Non ci sono prodotti a carrello.
Il rilevamento di persone, animali e in generale di corpi caldi viene da tempo effettuato utilizzando i radar a infrarossi passivi, meglio noti come P.I.R. (acronimo di Passive Infrared Radar) che funzionano ponendo un sensore piroelettrico, quindi di calore, dietro a una lente di Fresnel, la quale ha la caratteristica di concentrare in un solo punto (fuoco) i raggi infrarossi costituenti il calore rilevato frontalmente, emesso da oggetti in movimento entro un certo angolo.
I sensori P.I.R. coprono una gran quantità e varietà di applicazioni e rappresentano una soluzione ormai a basso costo per proteggere dall’intrusione, attivare automaticamente utilizzatori al rilevamento di persone in movimento ecc., tuttavia presentano il limite di poter rilevare solo ciò che è a portata visiva: non riescono a rilevare persone che si muovono, pur a distanza ridotta, dietro porte e finestre, quindi nel caso siano impiegati in un sistema d’allarme antifurto, scattano solo quando l’intruso si è ormai introdotto nel locale dove sono installati.
Per ottenere una protezione preventiva è possibile ricorrere a sensori a radiofrequenza e, per la precisione, a microonde, che riescono a rilevare le persone al di là di porte ed anche pareti purché non troppo spesse o in cemento armato o in metallo, ovvero contenenti reti metalliche di rinforzo dell’intonaco (in pareti a camera d’aria) o vani per porte a scomparsa tipo Scrigno.
I rilevatori a microonde possono essere monostatici (come il nostro) oppure bistatici, ossia montati in coppia uno di fronte l’altro; in quest’ultimo caso emittente e ricevitore sono alloggiati in unità separate. Le unità monostatiche definiscono una zona di rilevamento basata sul fascio di microonde che emettono e la copertura che offrono può raggiungere 300÷400 metri lineari; è inoltre possibile configurare il fascio RF per adattarlo a situazioni particolari, quindi allungarlo o accorciarlo, restringerlo (così da avere un raggio più lungo) o allargarlo (cosa che implica un accorciamento della distanza ma una copertura angolare maggiore).
Al contrario, un rilevatore a microonde bistatico offre una gamma più ampia di rilevamento, fino anche ad 1 km, ma è molto delimitato; trova applicazione su installazioni per muri esterni, pensiamo alla protezione all’ingresso del giardino. I sensori bistatici inoltre sono più inclini a falsi allarmi perché emettono frequenze, attivandole e disattivandole in rapida successione, seguiti da una disattivazione del ricevitore. L’unità utilizza questi intervalli di tempo per rilevare il movimento attraverso la verifica della posizione degli oggetti in momenti diversi.
In queste pagine vi proponiamo il progetto proprio di un sensore a microonde basato su un modulo dedicato in formato breakout board.
Il sensore a microonde
Il rilevamento della presenza e del movimento di persone è ottenuto mediante l’irradiazione nella direzione da rilevare, di onde radio ad alta frequenza, tanto alta che le onde stesse viaggiano quasi in linea retta. Il sensore utilizzato, al momento della taratura iniziale registra di quanta energia ha bisogno per coprire l’area sottoposta al controllo grazie a un diodo rettificatore posto nell’integrato.
Quando una persona entra nella zona coperta, l’energia che il sensore impiega per saturare l’area cambia e tale mutamento viene registrato e se supera la soglia preimpostata fa scattare l’allarme. La soglia determina la sensibilità del sensore e serve per evitare che l’allarme scatti ad esempio quando nella zona coperta entra un corpo troppo piccolo (un uccellino, un cane o un gatto).
La piedinatura (ossia la disposizione dei contatti, che sono in linea) è la seguente:
• 1 = 3V3 (uscita stabilizzata a 3,3 volt);
• 2 = GND (massa comune);
• 3 = OUT (uscita normalmente a 0V e attiva a 3,3 V);
• 4 = VIN (positivo alimentazione);
• 5 = CDS (inibizione dell’uscita).
Quest’ultimo piedino, se tenuto a livello basso (meno di 0,7 volt) mantiene OUT a zero logico anche in caso di rilevamento del movimento; serve ad esempio in operazioni di manutenzione per evitare che l’allarme venga trasmesso a un sistema antifurto centralizzato.
All’interno dell’integrato RCWL-9196 c’è un regolatore di tensione che partendo dalla tensione d’ingresso applicata a VIN (da 5 a 24Vcc) ricava 3,3 volt esatti.
L’elettronica del sensore contempla un oscillatore Colpitts basato sul transistor NPN per microonde MMBR941M, il quale viene fatto oscillare grazie a capacità parassite dovute alla particolare configurazione delle piste e all’induttanza realizzata anch’essa con una pista; la tipica frequenza di oscillazione è 3,181GHz e varia leggermente in base alla consistenza del corpo che si muove davanti al sensore.
Un integrato RCWL-9196, che contiene il miscelatore e il discriminatore del segnale RF, fornisce un segnale logico attraverso il proprio piedino VO, terminante sul contatto OUT del modulo RCWL-0516, in caso di rilevamento.
È interessante vedere la funzione di alcuni componenti chiave che contornano l’integrato RCWL-9196: iniziamo con il condensatore C1, collegato al piedino RC1 (4) in parallelo al C1, che regola il tempo di attivazione della ripetizione del segnale. Il tempo predefinito è 2 secondi, ma aggiungendo C1 si può estendere il tempo di attivazione della ripetizione. Il pin 3 dell’IC emette una frequenza (f) e il tempo di trigger, espresso in secondi è dato dalla formula:
t = (1/f) x 32.678
Nello stesso circuito si trova il resistore R2, che insieme a C1 e C2 forma la costante di tempo che impone t.
Passiamo al piedino 16, cui sono collegati resistenze e condensatori che definiscono la distanza di rilevamento: quella predefinita è 9 m, ma aggiungendo un resistore da 1MΩ (R3) si riduce a 5m; in linea generale, più alta è la resistenza, minore è la distanza coperta, perché la rete collegata al pin 16 è la retroazione di un operazionale.
Il piedino VC (9) dell’integrato è collegato a un partitore resistivo del quale fa parte un fotoresistore terminante a massa; verso il positivo di alimentazione interna del modulo RCWL-0516 vanno due resistori in parallelo. Il fotoresistore permette di attivare la funzione di rilevamento al buio, utile ad esempio per realizzare sensori da mettere in locali dove entrando si devono accendere automaticamente le luci. Rimuovendo il resistore R16, che è uno dei due formanti il parallelo, si può disattivare la funzione di rilevamento notturna.
Al piedino 14 giunge una porzione del segnale presente sull’emettitore del transistor oscillatore, che l’integrato utilizza per conoscere la frequenza trasmessa, in modo da poterla comparare con quella di ritorno riflessa dalle persone.
Il pin 12 (2OUT) dell’integrato è l’uscita analogica e può essere utilizzata ad esempio per rilevare la distanza di rilevamento, sulla base del segnale, la cui ampiezza è proporzionale a quanto distante è la persona rilevata.
Radar a microonde e P.I.R. a confronto
I sensori P.I.R. sono molto veloci nel rilevare l’attraversamento della zona coperta da parte di una persona, però sono lenti nell’accorgersi dell’ avvicinamento. Al contrario, i sensori a microonde sono più rapidi nel rilevare l’avvicinamento di una persona ma un po’ lenti nel rilevare l’attraversamento orizzontale.
Sul piano delle interferenze, i sensori P.I.R. sono molto sensibili ai disturbi termici, come ad esempio gli sbalzi di temperatura; invece ai microonde danno fastidio le radiofrequenze, quindi la vicinanza di ripetitori di radio, tv e telefonia mobile, per esempio. L’installatore quindi dovrà tener conto delle esigenze e soprattutto di eventuali disturbi presenti nella zona, personalizzare quindi l’antifurto in base alla zona e all’ambiente.
Esistono in commercio anche rilevatori a doppia tecnologia, ossia ibridi che impiegano sia il radar a infrarossi passivi, sia il rilevatore a microonde; in essi l’allarme scatta solo se entrambi effettuano un rilevamento.
La scelta del sensore più adatto dipende dall’ambiente di utilizzo: i P.I.R. non vanno impiegati dove ci sono fonti di calore intenso che possono coprire il calore dei corpi da rilevare, ovvero dove esistono corpi riscaldanti che variano di intensità rapidamente; invece vanno bene dove ci sono interferenze elettromagnetiche che potrebbero dar fastidio al sensore a microonde: ad esempio ripetitori per telefonia mobile, televisione, WiFi molto potenti ecc.
Schema elettrico
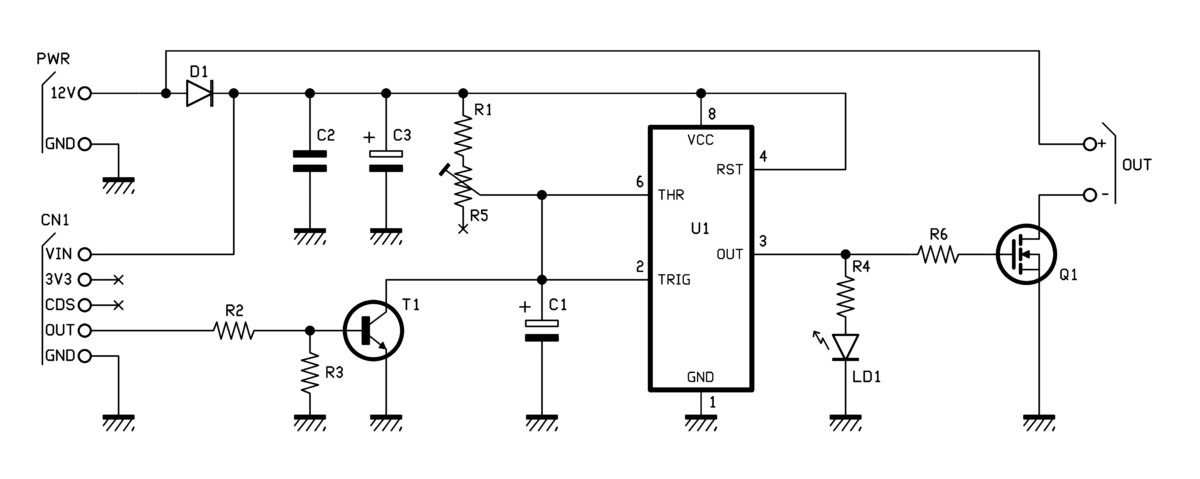
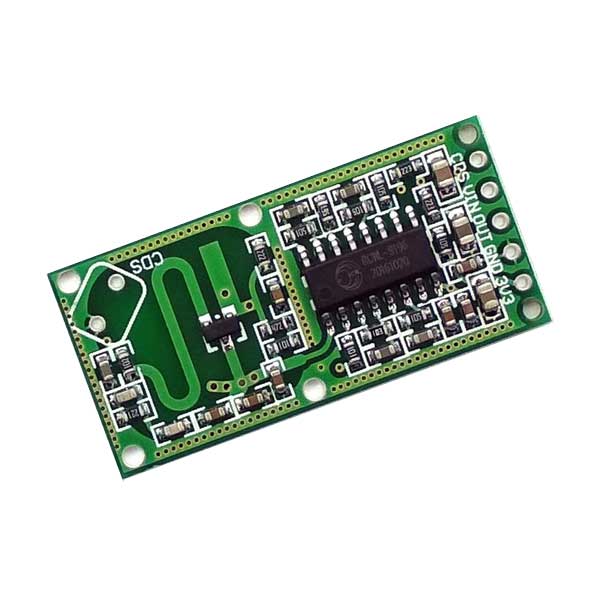
Il nostro sensore è sostanzialmente un radar basato sull’effetto doppler, composto da un’elettronica descritta dallo schema elettrico, nella quale si inserisce la breakout board del sensore. Quest’ultima si basa sull’integrato RCWL9196 che si interfaccia a una cavità radar realizzata con un oscillatore Colpitts a BJT di tipo MMBR941M, il quale sfrutta le piste del PCB per realizzare delle capacità e l’induttanza necessarie al proprio funzionamento. La Fig. 1 mostra lo schema elettrico della breakout board, il cui aspetto è quello visibile in Fig. 2.
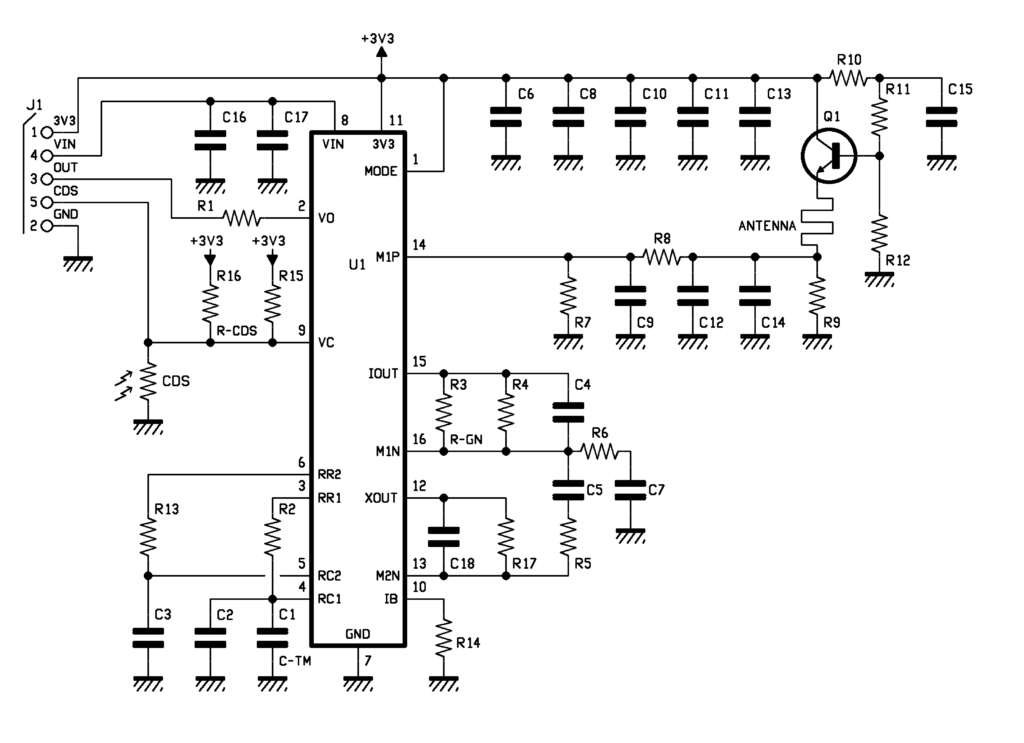
Fig. 1 – Schema del modulo RCWL-0516
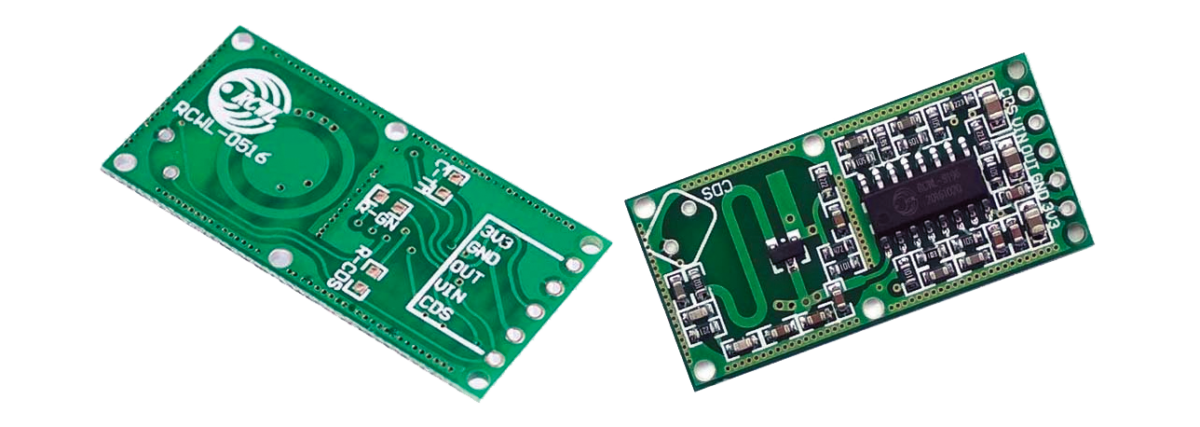
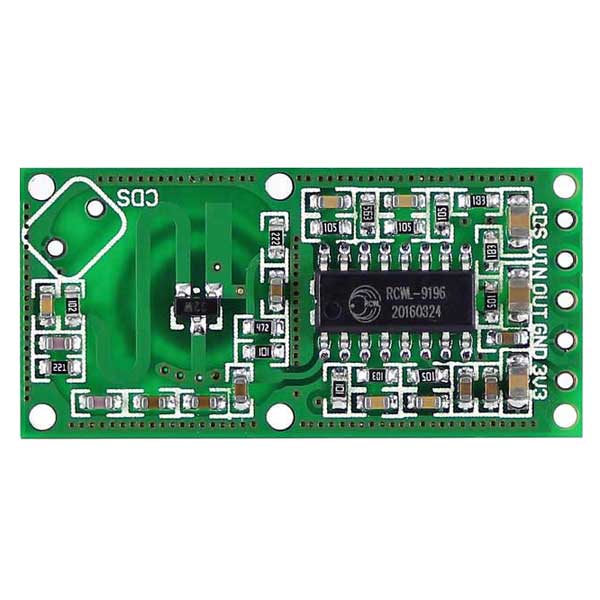
Fig. 2 Il modulo RCWL-0516.
L’effetto Doppler è un fenomeno fisico che consiste nel cambiamento, rispetto al valore all’emissione, della frequenza percepita da un ascoltatore raggiunto da un’onda emessa da una sorgente che si trovi in movimento rispetto all’osservatore stesso: tipico è l’esempio dell’autoambulanza, la cui sirena cambia di tono (diventa più grave) man-mano che si allontana, oppure del fischio del treno in corsa.
Il nome dell’effetto si deve a Christian Andreas Doppler, che per primo lo notò e documentò; più tardi Hippolyte Fizeau scoprì che lo stesso effetto si verifica con le onde elettromagnetiche emesse da un’antenna trasmittente in movimento, rilevate da una ricevente fissa.
L’effetto Doppler si spiega col fatto che allontanandosi la fonte sonora, la lunghezza d’onda, a parità di velocità del suono, aumenta.
Ciò detto passiamo alla breakout board utilizzata nel progetto, che realizza un modulo a microonde con antenna planare realizzata sul PCB e contiene un oscillatore, un mixer RF e un discriminatore che rileva l’alterazione delle onde radio causata dalla presenza di una persona in movimento intercettata nell’area coperta dal sensore stesso.
L’integrato RCWL9196 contiene il miscelatore e il discriminatore del segnale RF e fornisce, attraverso il proprio piedino VO, terminante sul contatto OUT della breakout in cui è montato, un segnale logico quando avviene il rilevamento; per l’esattezza OUT è a livello logico basso a riposo e quando viene rilevato un oggetto in movimento passa da zero ad 1 logico (3,3 volt) per poi tornare a zero.
Il modulo è collegato al circuito tramite una fila di piazzole in cui andrà saldato e prende l’alimentazione dal contatto Vin (a valle del diodo di protezione dall’inversione di polarità D1) e GND, mentre fornisce il proprio segnale logico di uscita tramite il contatto OUT; il segnale d’uscita della breakout board pilota la base di un transistor NPN utilizzato come adattatore di livello e inverter, quindi configurato a emettitore comune, il cui collettore trascina a massa, quando OUT sale a 3,3V (uno logico) il piedino di trigger (2) di un integrato timer 555 qui utilizzato nella configurazione da multivibratore monostabile retriggerabile. Ciò significa che il 555 fornirà un impulso di durata costante ma se verrà triggerato nuovamente prima dello scadere del tempo corrispondente, la temporizzazione riprenderà dal principio.
Dunque, lo scopo di questo stadio è ricavare un impulso di uscita di durata ben definita e regolabile tramite il trimmer R5, ogniqualvolta il sensore a microonde si attiva e fornisce un impulso a livello logico alto. La durata (t) dell’impulso è circa uguale a:
t = 1,1 x C1 (R1+R5)
ed essendo R5 un trimmer collegato come reostato, possiamo variare il tempo in base alle nostre esigenze, tra un minimo di 0,25 e un massimo di 24 secondi. Nella formula, t risulta in secondi se C1 è espresso in microfarad e le resistenze in megaohm.
Il funzionamento del monostabile retriggerabile si spiega considerando che all’interno del 555 si trovano due comparatori che hanno come riferimento le tensioni ricavate da un partitore a scala di resistenze composto da tre resistori uguali, che forniscono circa 2/3 della tensione d’alimentazione (pin 8) al comparatore superiore (il cui input non-invertente è connesso al THRESHOLD, piedino 6) e circa 1/3 al comparatore inferiore, il cui ingresso invertente è collegato al pin 2 (TRIGGER). I due comparatori pilotano un flip-flop RS, la cui caratteristica è di avere due ingressi che condizionano lo stato dell’uscita Q: l’uscita del primo comparatore pilota l’input R (che posto ad 1 logico manda a zero l’uscita Q) e quella del comparatore inferiore comanda l’input S del flip-flop, che quando posto ad 1 logico forza nello stesso stato l’uscita Q. Il flip-flop RS interno al 555 ha anche un’uscita complementata (/Q) che assume, cioè, lo stato opposto a quello della Q e che pilota un transistor NPN configurato a emettitore comune open-collector, il cui collettore termina sul piedino 7 (DISCHARGE) dell’integrato. L’uscita Q viene invece riportata al piedino 3, che è l’output del 555 con cui pilotiamo un MOSFET a canale N enhancement-mode configurato ad open-drain e deputato alla commutazione di un carico elettrico in continua.
In condizioni di riposo, ossia quando il modulo sensore RF ha l’uscita a livello basso, il transistor T1 si trova interdetto e il condensatore C1 si carica attraverso la serie R1-R5; quando la tensione tra le sue armature supera i 2/3 dell’alimentazione del 555, il flip-flop viene resettato, cosicché la sua uscita passa a 0 logico e il piedino 3 va nello stesso stato. Il circuito rimane in questa condizione finché non giunge un impulso a livello alto sul contatto OUT, che fa andare il transistor T1 in saturazione e scaricare il condensatore C1; tale condizione fa commutare il comparatore inferiore del 555, la cui uscita attiva il SET del flip-flop, mandando il piedino 3 a livello logico alto, che si mantiene fin quando il condensatore C1 non si sarà ricaricato abbastanza da riportare il piedino 6 a un potenziale superiore ai 2/3 di quello d’alimentazione.
C1 può ricaricarsi quando OUT torna a zero logico, allorché T1 va nuovamente in interdizione; se per caso prima dello scadere del tempo impostato (t) il sensore RF emette un nuovo impulso, T1 torna in saturazione e scarica quasi istantaneamente l’elettrolitico, facendo ripartire da zero la temporizzazione e prolungando la permanenza del piedino 3 dell’integrato a livello alto.
Come accennato poc’anzi, l’uscita del 555 pilota un interruttore statico a MOSFET cui affidiamo l’accensione (pin 3 del 555 a livello alto) e lo spegnimento del carico, che può essere un relé per pilotare utilizzatori a 230Vca o una lampadina, avvisatore acustico o dell’altro funzionante in continua, a bassa tensione.
La tensione del carico dev’essere la stessa di quella d’alimentazione del circuito, quindi nessun problema a gestire utilizzatori funzionanti tra 5 e 24 Vcc.
La corrente erogabile dal MOSFET tiene conto anche della dimensione delle piste del circuito stampato ed ammonta a un massimo di 500 mA.
L’intero circuito si alimenta tramite i contatti + e – PWR e l’alimentazione del carico (cioè dell’interruttore statico a MOSFET) è prelevata in parallelo ad essi; invece la tensione che va al modulo sensore RF e allo stadio monostabile basato sul 555 passa attraverso il diodo di protezione D1, che nel caso per errore applichiate l’alimentazione al contrario evita di guastare l’elettronica.
Caratteristiche tecniche
- Tensione di alimentazione: 12 V - Corrente assorbita (senza carico): 15 mA - Distanza di rilevamento: 5÷9 m - Potenza di trasmissione: 20÷30 mW - Uscita: open-collector 0/12V - Modalità uscita: monostabile - Durata impulso d’uscita: 0,25-24 s - Corrente di uscita: 2A - Temperatura di funzionamento: da -20°C a +80°C
Realizzazione pratica
Ciò detto passiamo alle note costruttive, spiegando come costruire il sensore: la prima operazione consiste nel preparare il circuito stampato, che è monofaccia e quindi facilmente realizzabile a basso costo con il servizio PCBPRODUCTION a partire dalla traccia lato rame scaricabile dalla sezione Download di questo articolo.
Quindi iniziate il montaggio partendo dai componenti (tutti a montaggio tradizionale, ossia THT) a partire da resistenze e diodo e proseguendo con lo zoccolo per il 555, i condensatori e i transistor T1 e Q1; per l’orientamento dei componenti polarizzati (condensatori elettrolitici, diodo, integrato 555 e transistor) seguite il piano di montaggio.
Il modulo sensore a microonde è previsto che sia posizionato in piedi, inserito in una fila di contatti femmina (strip) a passo 2,54 mm, dopo aver saldato nelle sue piazzole una fila di pari numero di pin ad angolo retto, che ne consentiranno l’inserzione. Il corretto verso d’inserimento del modulo è con il lato dei componenti verso l’esterno del circuito stampato.
Per l’alimentazione abbiamo previsto una tensione di 12V, ma potete scegliere la tensione (purché continua) di valore più adatto al carico che intendete collegare all’uscita OUT del circuito, restando, naturalmente, nei valori previsti, ossia tra 5 e 24 Vcc. La corrente (alimentatore o batteria) utilizzata per far funzionare il circuito dovrà essere commisurata all’assorbimento del carico, tenendo presente che quest’ultimo non dovrà superare 500 mA.
Per l’utilizzo, il circuito va racchiuso in un contenitore in plastica comune (ABS, per esempio) non conduttiva: nella scatola potete far stare anche il modulo sensore, giacché le onde radio ad alta frequenza che emette non vengono ostacolate dalla plastica. Evitate nella maniera più assoluta i contenitori in metallo, perché se il sensore è posto al loro interno bloccano le microonde, mentre se è all’esterno o affacciato a una finestra, il metallo interagisce comunque (specie se è ferro o acciaio) con il campo elettromagnetico a RF generato.
Naturalmente la parte irradiante del modulo sensore andrà rivolta verso la zona dove rilevare le persone; ricordate che il sensore irradia frontalmente, vale a dire dal lato dei componenti, quindi è così che va puntato. Evitate di mettere in vicinanza parti di metallo e in particolare relé tradizionali elettromeccanici, giacché avendo una parte metallica in movimento, quando l’equipaggio mobile viene attratto o rilasciato interferirebbe con le onde radio emesse dal sensore e darebbe luogo a falsi positivi.
Piano di montaggio
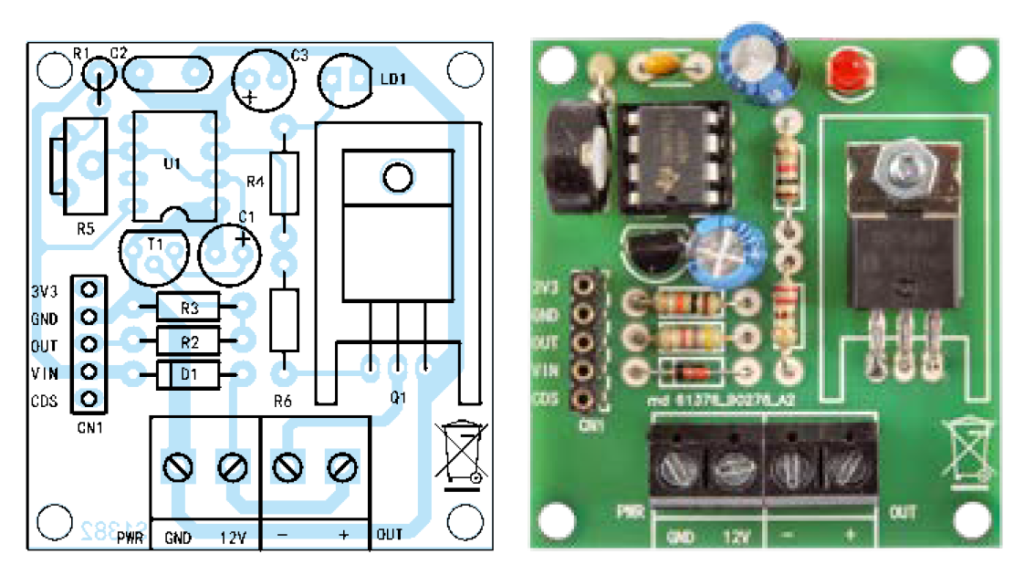
Elenco componenti
C1: 47 µF 63 VL elettrolitico C2: 100 nF ceramico C3: 100 µF 25 VL elettrolitico R1, R2: 4,7 kohm R3: 10 kohm R4: 1 kohm R5: Trimmer 470 kohm MV R6: 220 ohm LD1: LED 3 mm rosso D1: 1N4148 T1: BC547 U1: NE555 Q1: IRF540 Varie: - Morsetto 2 vie passo 5 mm (2 pz.) - Zoccolo 4+4 - Strip femmina 5 vie - Strip maschio 5 vie 90° - Vite 10 mm 3 MA - Dado 3 MA - Circuito stampato S1283 (44 x 47 mm)
Conclusioni
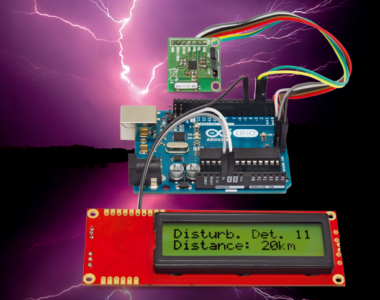
Oltre che al circuito descritto in queste pagine, il modulo RCWL-0516 può essere abbinato ad Arduino o Fishino, interfacciato al quale (come vedete nella Fig. 3) può essere utilizzato per l’apertura automatica di porte e cancelli motorizzati, accensione automatica di luci nei locali o nei punti di passaggio, ma anche per la realizzazione di sistemi d’allarme antiintrusione.
Volendo, è possibile prelevare l’uscita analogica dell’RCWL-9196 e leggerla con uno degli input analogici di Arduino, per ottenere anche una misura indicativa della distanza dalla persona rilevata, sulla base dell’ampiezza del segnale.
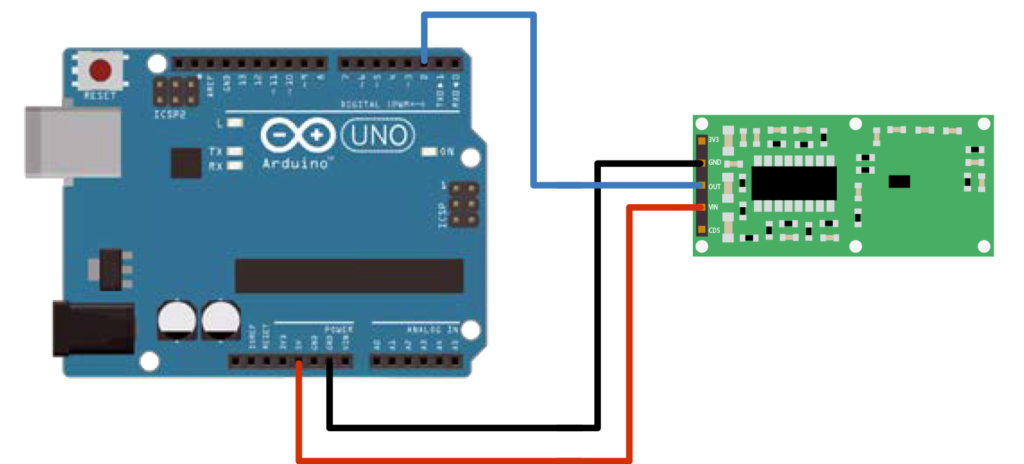
Fig. 3 Interfacciamento del modulo ad Arduino Uno.
Download
Gerber per Sensore a microonde
1 file(s) 27.87 KB
Per il download di questo file è necessario essere registrati al sito