Non ci sono prodotti a carrello.
CAN HAT per Raspberry Pi

€39,00 IVA inclusa
Basata sul chip MCP2515 (CAN controller) e sull’MCP2551 (ricetrasmettitore CAN ad alta velocità) della Microchip, questa shield permette a Raspberry Pi, di interfacciarsi con dispositivi CAN-bus
oppure
Puoi anche pagare in 3 rate senza interessi da €13,00 scegliendo ![]() come pagamento. Scopri di più
come pagamento. Scopri di più
| Basata sul chip MCP2515 (CAN controller) e sull’MCP2551 (ricetrasmettitore CAN ad alta velocità) della Microchip, questa shield permette a Raspberry Pi, di interfacciarsi con dispositivi CAN-bus. L’hat, unito alla versatilità della Raspberry Pi, può essere utilizzato in una moltitudine di casi pratici, partendo da applicazioni legate all’automotive (dove da molti anni si fa largo uso del Can Bus) fino ad applicazioni di domotica e di automazione industriale a vari livelli. Viene fornito completamente montato e collaudato. | |
|
Il protocollo CAN
|
|
| Il protocollo CAN (Controller Area Network) è stato creato dalla Robert Bosch GmbH negli anni 80 del secolo scorso, con l’idea di creare uno standard multicast per le comunicazioni seriali a corto raggio tra diverse unità elettroniche, caratterizzato da alta immunità ai disturbi, basso costo ed elevata affidabilità, principalmente per applicazioni in ambito automotive, nelle quali costituisce attualmente il principale bus di comunicazione utilizzato per i “domini” classici (body, chassis, powertrain). Questo standard si sta ormai diffondendo anche al di fuori dell’automotive, iniziando a penetrare all’interno di settori come l’automazione ed il controllo industriale, il monitoraggio e l’aerospace. Esempi di estensioni del protocollo verso altri campi di applicazione sono il CANopen per settore industriale e CANaerospace per il settore aerospaziale. Dal punto di vista trasmissivo il CAN utilizza una linea a differenza di potenziale bilanciata, come quella della RS-485. I dati sono trasmessi secondo un modello basato su bit “dominanti” (0 logico) e “recessivi” (1 logico). Se un nodo trasmette un bit dominante ed un altro un bit recessivo, allora il bit dominante “vince” fra i due, ed il trasmettitore del bit recessivo è in grado di rilevare questa situazione (collisione). Questo permette ai trasmettitori di auto-escludersi dalla rete in caso in cui venga rilevata una situazione di questo tipo, in modo da non generare disturbi (questa fase viene comunemente indicata come fase di arbitraggio). Il Bus supporta diversi data rate, ma lo standard definisce un limite superiore di 1Mbit. Abbassando opportunamente il data rate è possibile raggiungere distanze anche molto elevate, rendendo il CAN un bus adatto anche ad applicazioni di campo (si veda Tabella 1). Attualmente l’industria automobilistica sta iniziando a sperimentare l’utilizzo di tecnologie alternative al CAN per l’implementazione dei futuri bus di comunicazione veicolare; lo standard ethernet, nella variante BroadR-Reach, è uno dei più promettenti candidati a sostituire il CAN in questo genere di applicazioni. Tuttavia è facile immaginare che la migrazione verso tali tecnologie sarà un processo tutt’altro che veloce, infatti lo standard CAN viene ancora oggi aggiornato per permettergli di continuare a soddisfare i requisiti delle applicazioni più moderne, che richiedono prestazioni sempre superiori, specialmente in termini di banda passante; è infatti di recente emanazione una estensione del protocollo, denominata CAN-FD (CAN with Felxible Data-Rate), che permette, tramite complesse tecniche di frequency-switching, di aumentare la banda passante del CAN da 1 ad 8Mbit, pur mantenendo la retrocompatibilità con la versione 2.0B, ultima release ufficiale dello standard. | |
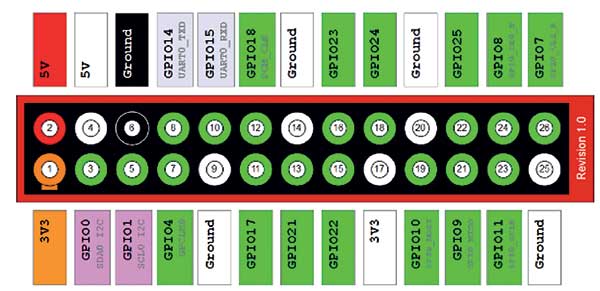
| Connettore GPIO 40PIN Raspberry Pi | |
 |
|
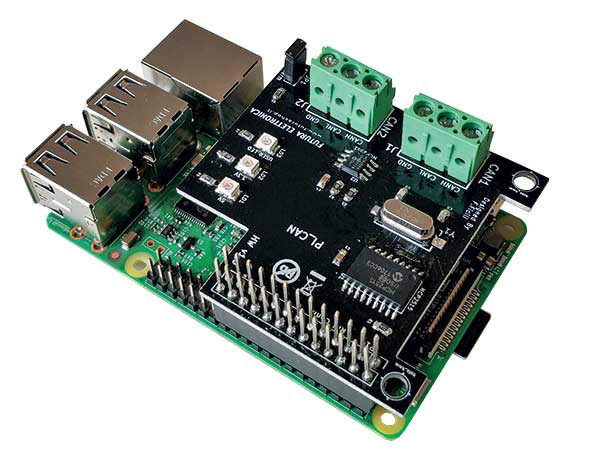
| Il connettore GPIO 26 PIN della shield | |
 |
|
| La shield montata su una Raspberry Pi 3 B+ (non compresa) | |
 |
|
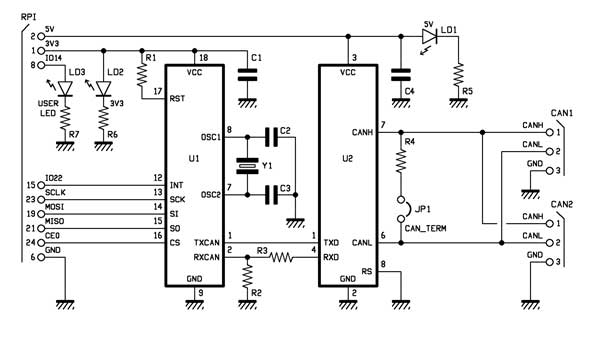
| Schema elettrico | |
 |
-
 €129,00 IVA inclusa
€129,00 IVA inclusaDisponibilità immediata.
-
€83,00 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
-
 €65,00 IVA inclusa
€65,00 IVA inclusaDisponibilità immediata.
-
 €64,00 IVA inclusa
€64,00 IVA inclusaDisponibilità immediata.