Non ci sono prodotti a carrello.
MECCANICA SPIDERIN

Semplice da realizzare e con una buona stabilità (durante i movimenti, tre zampe rimangono sempre a contatto con il suolo mentre una sola si muove, alzandosi), questo originale robot è in grado di camminare come un ragno, avanti, indietro e lateralmente, identificando ed aggirando eventuali ostacoli grazie ad un sensore ad ultrasuoni
Semplice da realizzare e con una buona stabilità (durante i movimenti, tre zampe rimangono sempre a contatto con il suolo mentre una sola si muove, alzandosi), questo originale robot è in grado di camminare come un ragno, avanti, indietro e lateralmente, identificando ed aggirando eventuali ostacoli grazie ad un sensore ad ultrasuoni. È dotato di 4 zampe mosse da 8 servo (due per zampa) e meccanica realizzata in vetronite, non necessita di saldature. Il robot può essere controllato (nelle funzioni essenziali) a distanza tramite un telecomando IR (un normalissimo telecomando di quelli usati per i televisori o video-registratori).
Il kit comprende tutti i particolari meccanici e gli 8 servo. Non comprende la scheda di controllo Robot_Shield, la scheda ArduinoUnoREV3 e le batterie.
| COSA SERVE PER COMPLETARE IL ROBOT |
|
QUANTITÀ
|
PRODOTTO
|
|
1
|
8190-ROBOT_SHIELD "SHIELD DI CONTROLLO PER ARDUSPIDERIN, ARDUBIPE E ARDUFILIPPO"
|
|
1
|
7300-ARDUINOUNOREV3 "ARDUINO UNO REV3 CON ATMEGA328"
|
|
6-8
|
BATTERIE RICARICABILI NiMh O NiCd FORMATO STILO
|
+
| GUARDA IL VIDEO |
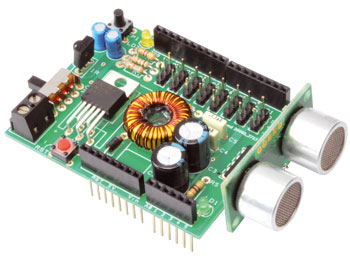
| LA SCHEDA DI CONTROLLO "ROBOT_SHIELD" |
| IL CONTROLLO CON UN TELECOMANDO IR |
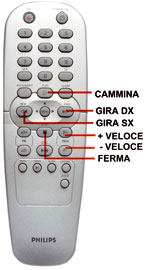
Lo sketch è previsto per funzionare con telecomandi che usano la codifica Philips, che è la più utilizzata nei televisori; se usate un trasmettitore di marca differente i codici dei pulsanti non corrispondono e dovrete modificare lo sketch, inserendo i codici che Serial Monitor mostra sullo schermo del PC quando trasmettete col vostro telecomando (Fig.8 e Fig.9).
FIGURA 8
FIGURA 9


Ad esempio, se utilizzate un telecomando LG noterete che il codice inviato è unico indipendentemente da come premete
i pulsanti. Volendo, ad esempio, assegnare il pulsante “freccia in su” della navigazione a menù alla funzione di camminata, non dovrete fare altro che premerlo, leggere il codice IR ricevuto e trascriverlo nella riga dello sketch che assegna il codice per la camminata:
#define WALK_CODE1 0x20DF02FD
#define WALK_CODE2 0x20DF02FD
I parametri che possono essere modificati da programma per adattare i movimenti sono:
int TimeOneStep = 2000;
int AmpPasso = 30;
int IncPasso = 15;
int AmpRuota = 30;
int IncRuota = 18;
TimeOneStep è il valore iniziale del tempo impiegato per eseguire un passo, può essere modificato da telecomando da un minimo di 1 ad un massimo di 4 secondi.
AmpPasso è la massima ampiezza (in gradi) dell’angolo formato dalle gambe durante la camminata; il suo valore può variare da un minimo di 5 ad un massimo di 40.
IncPasso è la massima inclinazione del robot durante la camminata; il suo valore può variare da un minimo di 5 ad un massimo di 20 e deve garantire al robot di rimanere in equilibrio su una gamba mentre compie un passo.
AmpRuota è la massima ampiezza in gradi dell’angolo formato dalle gambe durante la rotazione; il suo valore può variare da un minimo di 5 ad un massimo di 40.
IncRuota è la massima inclinazione del robot durante la rotazione; il suo valore può variare da un minimo di 5 ad un massimo di 20.
| DOCUMENTAZIONE E LINK UTILI |
| Documentazione Tecnica | |
| PDF italiano |
-
-
 €18,00 IVA inclusa
€18,00 IVA inclusaDisponibilità immediata.
