Non ci sono prodotti a carrello.
Unità CAN slave a relè



€33,00 IVA inclusa
Basata sul microcontrollore PIC16F1829 della Microchip e dotata di interfaccia CAN, 4 relé con relativo LED di stato, 2 LED per l’indicazione del traffico sul bus e controllata tramite un set di comandi di alto livello (inviati tramite opportuni messaggi CAN), questa scheda, abbinata alla scheda CAN master, permette di realizzare un sistema di controllo per carichi elettrici, e a seconda dell’impostazione del baud rate, di ottenere collegamenti che possono raggiungere distanze di alcuni chilometri
oppure
Puoi anche pagare in 3 rate senza interessi da €11,00 scegliendo ![]() come pagamento. Scopri di più
come pagamento. Scopri di più
|
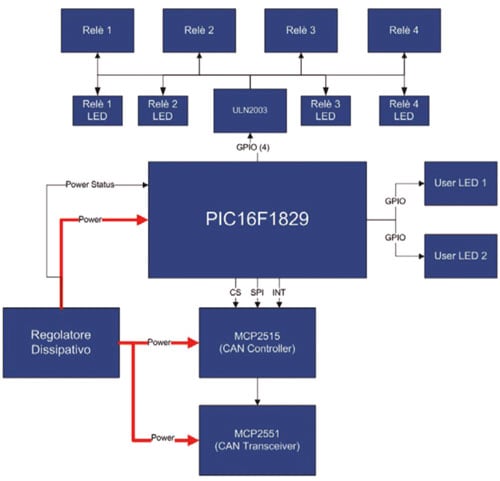
Basata sul microcontrollore PIC16F1829 della Microchip e dotata di interfaccia CAN, 4 relé con relativo LED di stato, 2 LED per l’indicazione del traffico sul bus e controllata tramite un set di comandi di alto livello (inviati tramite opportuni messaggi CAN), questa scheda, abbinata alla scheda CAN master, permette di realizzare un sistema di controllo per carichi elettrici, e a seconda dell’impostazione del baud rate, di ottenere collegamenti che possono raggiungere distanze di alcuni chilometri. Le caratteristiche del CAN Bus rendono un sistema di questo tipo adatto a diverse applicazioni nelle quali sia necessario controllare un certo numero di carichi tramite una soluzione cablata con un certo numero di nodi e anche su distanze elevate. L’interfaccia CAN è costituita da controller MCP2515 e dal transceiver MCP2551. È possibile modificare i parametri di funzionamento della scheda slave, come ad esempio il baud-rate o il filtraggio hardware dei messaggi in ingresso, in modo da fornire al sistema un alto livello di configurabilità. Alimentazione: 5 Vdc. N.B. la confezione non comprende la scheda CAN Master e l’alimentatore. |
|
Schema a blocchi della scheda hardware
|
 |
|
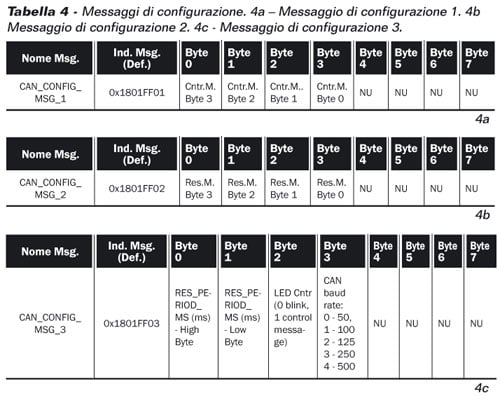
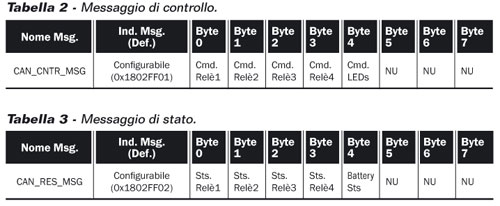
Mappa Messaggi CAN
|
|
Analizziamo adesso la mappa messaggi CAN del sistema. La mappa messaggi è un documento che descrive il contenuto informativo dei messaggi di un sistema basato su una rete CAN. Tale documento è indispensabile per decodificare correttamente i vari “segnali” contenuti all’interno dei messaggi. |
|
 |
|
|
|
| Documentazione e link utili |