Non ci sono prodotti a carrello.
ARDUPILOT MEGA 2.0 COMPLETO E MONTATO

Basata sul micro ATmega2560, ArduPilot Mega 2.0 è un completo sistema di autopilota open source, fornito completamente assemblato
Basata sul micro ATmega2560, ArduPilot Mega 2.0 è un completo sistema di autopilota open source, fornito completamente assemblato. Permette all’utente di trasformare qualsiasi veicolo ad ala fissa, rotante o multirotore (anche auto e barche) in un veicolo completamente autonomo; in grado di eseguire missioni programmate GPS con waypoints. Completamente programmabile è dotato di giroscopio a 3 assi, accelerometro a 3 assi, magnetometro 3 assi, sensore di pressione barometrica per l’altitudine, modulo ricevitore GPS con frequenza di aggiornamento di 10 Hz, sensore di segnalazione stato della batteria e memoria da 4 MB per la registrazione dei dati di bordo. Il firmware open source è disponibile in differenti versioni che supportano aerei (“ArduPlane”), multicotteri (quadricotteri, esacotteri, optocotteri, ecc) elicotteri (“ArduCopter”) e rover (“ArduRover”). Alimentazione: 5V, consumo: 200 mA, dimensioni (mm): 66,45 (lunghezza) x 40,62 (larghezza) x 12 (altezza).
CARATTERISTICHE TECNICHE
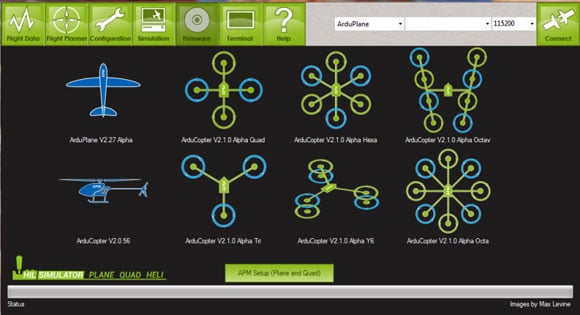
- Firmware open source fornito in differenti versioni che supportano aerei (“ArduPlane”), multicotteri (quadricotteri, esacotteri, optocotteri, ecc), elicotteri (“ArduCopter”) e rover (“ArduRover”)!
- Semplice processo di configurazione e caricamento del firmware tramite utility point-and-click. Non è richiesta nessuna programmazione!
- Può supportare centinaia di waypoints 3D
- Telemetria bidirezionale e comando di volo utilizzando il potente protocollo MACLink
- Libera scelta delle stazioni di terra, compreso APM Mission Planner, che comprende la pianificazione della missione, l’impostazioni dei parametri in volo, telecamera a bordo, sintesi vocale e registrazione completa dei dati con data logging e riproduzione.
- Cross-platform (Multi piattaforma). Supporta i sistemi operativi Windows, Mac e Linux. Utilizzare l’utility di configurazione grafica Mission Planner in Windows (funziona sotto Parallels su Mac o Mono su Linux) o interfaccia a riga di comando su qualsiasi altro sistema operativo. Le stazioni di terra sono disponibili per tutti e tre i sistemi operativi. Basato sul sistema di programmazione Arduino, che è anche completamente cross-platform.
- Decollo e atterraggio autonomi e speciali comandi per il controllo di videocamere e macchine fotografiche
- Supporta la simulazione completa “hardware-in-the-loop” con Xplane e Flight Gear
- Possibilità di attivare un relè esterno che può essere controllato dallo script della missione.
-
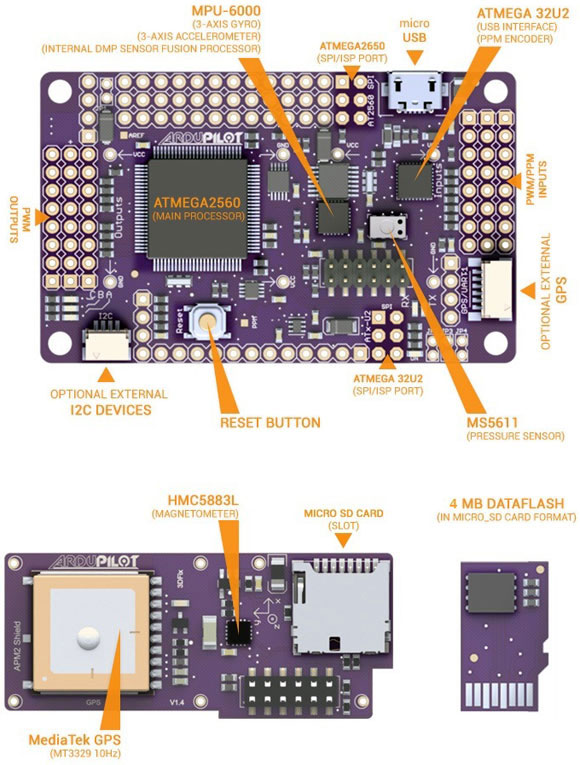
Dispositivi presenti sulla scheda:
– giroscopio a 3 assi
– accelerometro a 3 assi
– magnetometro 3 assi
– sensore di pressione barometrica per l’altitudine
– modulo GPS 10 Hz
– sensore di segnalazione stato della batteria
– memoria da 4MB per la registrazione dei dati di bordo. Le missioni possono essere registrate automaticamente e possono essere esportate in formato KML (Keyhole Markup Language)
– Ritorna autonomamente alla base in caso di perdita del segnale radio. - Dimensioni (mm): 66,45 (lunghezza) x 40,62 (larghezza) x 12 (altezza).
APM2 MONTATO NEL CONTENITORE (compreso nella confezione)
 |
 |
 |
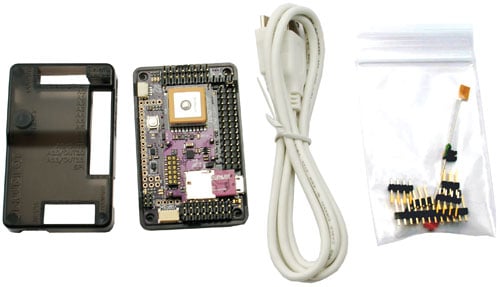
COSA COMPRENDE LA CONFEZIONE
DETTAGLI DELLA SCHEDA
ALCUNE SCHERMATE DEL SOFTWARE “MISSION PLANNER”



DOCUMENTAZIONE E LINK UTILI
- SET UP Guide
- ArduPlane code
- ArduCopter code
- ArduRover code
- ArduPilot Mega 2.0 eagle files; board layout and schematic
- Micro SD Dataflash eagle files, board layout and schematic
- ArduPilot Mega 2.0 Shield eagle files; board layout and schematic
- Power protection kit set up instructions (through-hole diode and fuse included with APM 2.0 board!)
- MPU-6000, Six-Axis (Gyro + Accelerometer) MEMS MotionTracking™ .
- HMC5883L-TR, 3-Axis Digital Compass.
- MediaTek MT3329 GPS 10Hz .
- MS5611, MEAS High Resolution Altimeter