Non ci sono prodotti a carrello.
ARDUSUMO ROBOT

Piattaforma universale per realizzare automi su ruote capaci di muoversi evitando o “puntando” gli ostacoli mediante sensori ad infrarossi e di seguire tracciati fatti da linee scure su sfondo chiaro
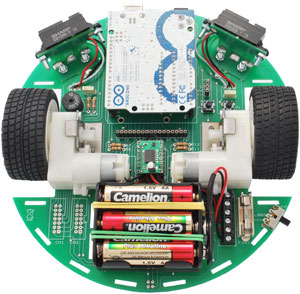
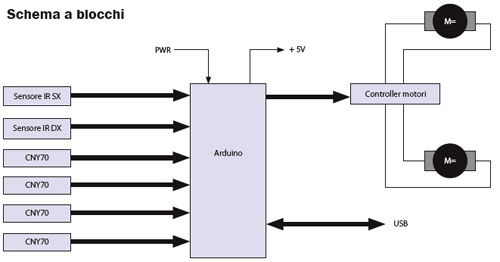
Piattaforma universale per realizzare automi su ruote capaci di muoversi evitando o “puntando” gli ostacoli mediante sensori ad infrarossi e di seguire tracciati fatti da linee scure su sfondo chiaro. Basata su Arduino, è composta da un unico stampato che è insieme telaio meccanico e circuito elettronico e che si presta a varie soluzioni di assemblaggio, grazie alla modularità e alla versatilità delle connessioni previste. Il circuito elettronico del robot per Ardusumo è molto semplice: al centro si trova Arduino UNO, che può essere eventualmente corredato di una o più shield; ad esso possono essere interfacciati quattro sensori ottici CNY70 (montati tre davanti ed uno indietro) e due radar ad infrarossi GP2D12 prodotti dalla Sharp. I sensori ottici sono puntati in basso e servono per seguire tracce segnate sul suolo, quindi percorsi nei labirinti, ma anche riconoscere quando il robot sta uscendo da un perimetro delimitato da una riga ben distinguibile; abbiamo deciso di metterne tre davanti e uno solo dietro perché il movimento in avanti deve essere più vario di quello all’indietro.
I tre anteriori sono allineati, cosicché quello centrale può seguire una traccia mentre quelli laterali permettono di rilevare se il robot sta uscendo a sinistra o a destra, quindi consentono al microcontrollore di rilevare il movimento e impartire i comandi per correggerlo. L’unico sensore posteriore è stato pensato per la competizione Ardusumo e serve a far percepire al microcontrollore quando il robot, spinto indietro dall’avversario, si approssima al bordo del ring; in questo caso il firmware prevede il comando di moto in avanti, per uscire dall’impasse. I due radar ad infrarossi sono invece puntati in avanti, leggermente inclinati lateralmente, e fanno da occhi, consentendo al robot di percepire gli ostacoli e aggirarli o, in base al firmware caricato, di andar loro incontro per ingaggiare un combattimento (questo è tipico della competizione Ardusumo). Alla scheda Arduino sono collegati anche due LED, usati per illuminare la scena davanti al robot, un cicalino per dare gli avvisi acustici, ed un controller doppio per motori che serve a pilotare i due motoriduttori, ognuno dei quali comanda una ruota di trazione; le ruote sono poste sullo stesso asse virtuale e, variandone la velocità, il microcontrollore di Arduino fa “sterzare” il robot. Anteriormente, un supporto a sfera di tipo “ball-caster” fa da terza ruota e tiene in equilibrio il robot; un secondo ball-caster si trova dal lato opposto e contribuisce all’equilibrio. Servono due supporti perché altrimenti, se ce ne fosse uno solo disposto anteriormente come una terza ruota (ossia realizzando una struttura a triciclo), il peso della batteria, che va montata posteriormente, farebbe sollevare il robot davanti.
| COSA COMPRENDE IL KIT… |
La scatola di montaggio comprende tutti i componenti elettrici e meccanici, i sensori e la board Arduino UNO. Non sono comprese le batterie e il cavo USB. Le calotte sono scaricabili qui.
| LA CALOTTA DEL ROBOT |
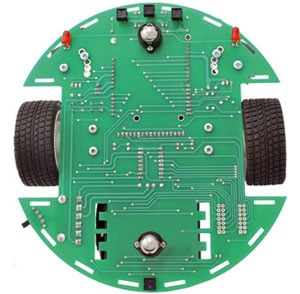
Può essere di spugna, polistirolo, plastica ma anche, più semplicemente, ottenuta da un cartoncino o un foglio di plastica ritagliato e assemblato con dello scotch, quindi dipinto a piacere. Per facilitare il fissaggio della calotta, il circuito stampato prevede 6+6 cave rettangolari lungo la circonferenza e 2+2 nelle cavità che ospitano le ruote.
|
Tonzura (robot aggressivo)
|
Dokurobe
|
Boyack
|
 |
 |
 |
|
Appena rileva un ostacolo lo attacca, nel senso che gli va addosso.
|
Combina strategie di attacco ad altre di aggiramento dell’ostacolo.
|
È invece più mansueto e potremmo considerarlo
un robot su ruote che circola ed evita gli ostacoli, in quanto rilevando un oggetto lo aggira o torna indietro. |
| IMMAGINI DI ARDUSUMO |
 |
 |
| SCHEMA A BLOCCHI |
| IL SUMOROBOT |
ArduSumo è una competizione tra robot che si comportano come i lottatori di Sumo, organizzata da DiScienza (www.discienza.org) e ispirata all’antico sport di lotta giapponese, dove due avversari si affrontano su un ring delimitato e dove vince quello che, applicando la migliore strategia che combina forza ed astuzia, riesce a spingere l’altro all’esterno del terreno di gara.
ArduSumo è in realtà un laboratorio didattico di robotica rivolto agli studenti delle scuole medie e di istruzione secondaria, sia in forma diretta che attraverso la partecipazione a manifestazioni ed eventi.
Il laboratorio propone ai partecipanti di realizzare robot lottatori (SumoRobot) basati su Arduino, capaci di muoversi rispettando le regole del Sumo. In quest’ottica si inquadra la nostra piattaforma, che è basata su Arduino e possiede l’hardware per realizzare un robot capace di funzionare autonomamente e partecipare a competizioni quali quelle previste dalla Robocup o come Ardusumo. Il SumoRobot è l’automa lottatore per le competizioni di sumo che si tengono in tutto il mondo; la sua configurazione e le regole di combattimento sono di conseguenza.
Il SumoRobot, come i robot da Sumo di “categoria”, è costituito da un telaio montato su due ruote mosse indipendentemente da altrettanti motori comandati dal processore centrale; un terzo supporto a sfera garantisce l’equilibrio. Sul telaio sono poi montati il processore, i vari sensori di riconoscimento del terreno di gara e dell’avversario, e la batteria. Frontalmente è presente una struttura atta a facilitare la spinta dell’avversario. La logica generale di funzionamento di un SumoRobot rispecchia il comportamento di un vero lottatore di Sumo: all’inizio i due concorrenti si dispongono uno di fronte all’altro al centro del ring e restano immobili in attesa del segnale dell’arbitro, che in questo caso segue un conteggio alla rovescia a partire da un segnale iniziale.
Poi inizia il combattimento reale, durante il quale ogni robot cerca l’avversario mediante i sensori sonar e all’infrarosso, muovendosi in modo da ispezionare la maggiore area possibile del terreno di gara. Durante questa azione è vitale verificare di non uscire dal ring; allo scopo il SumoRobot deve riconoscere la corona circolare più chiara che delimita il bordo esterno del ring. Se identifica il bordo, l’elettronica del robot interviene sui motori in modo da rientrare, ma tenendo d’occhio l’avversario. Una volta riconosciuta la presenza dell’avversario nel campo dei propri sensori, il robot attiva le strategie di avvicinamento prima e di attacco poi, ciascuna delle quali prevede una distribuzione ottimale della potenza dei motori e della gestione dei sensori; ciò perché bisogna sempre stare attenti a non uscire dal ring mentre si attacca e si spinge l’avversario. La livrea del robot ha la sua importanza: colori scuri sono più difficili da individuare dai sensori all’infrarosso, mentre superfici riflettenti confondono i sensori sonar. Peso, bilanciamento e forma della sezione frontale facilitano la spinta dell’avversario o permettono al robot spinto di resistere meglio.
| DOCUMENTAZIONE E LINK UTILI |
| Documentazione Tecnica | |
| PDF italiano |