Per le nostre prove abbiamo utilizzato una batteria composta da due celle LiPo da 850 mah, che, essendo piccole e leggere, trovano facilmente posto e non appesantiscono la struttura. Consigliamo di programmare Arduino prima di collegare i servo, onde evitare che un eventuale programma precedentemente in memoria fornisca segnali che possono portare a movimenti scomposti. Ricordatevi che se alimentate Arduino solo tramite la USB, per programmarlo, parte della tensione finirà sullo shield, quindi consigliamo di collegare il cavo USB solo quando è presente anche l’alimentazione principale sui punti BAT; diversamente, potrebbero esserci problemi con i servo.
Lo sketch da caricare in Arduino si chiama e mantiene la stessa struttura del software utilizzato con ArduFilippo, con le dovute modifiche e aggiunte.
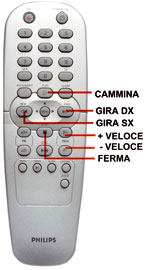
Tramite Serial Monitor si deve inviare il comando composto dalla lettera del servo da settare, seguito dal valore che si vuole impostare (compreso tra 80 e 100). Al Servo0 corrisponde la lettera “a” ed al Servo5 la “f”; gli altri vanno di conseguenza. Se il comando è andato a buon fine, su Serial Monitor ne avrete conferma; ad esempio,“set servo: a to 90”. se il robot tende a cadere in avanti o indietro, oppure se durante la camminata tende a deviare dalla linea retta. Dalle foto riportate nell’articolo noterete che il dorso è leggermente piegato in avanti nell’intento di bilanciare i pesi. A lavoro ultimato usate del nastro adesivo e delle fascette per mettere in ordine e raggruppare i cavi dei servocomandi, così il robot avrà un aspetto più ordinato. Nel Bipe sono previste ulteriori funzioni come l’inchino ed il calcio.
Al pulsante 1 del telecomando corrisponde la funzione calcio con la quale il robot può colpire, ad esempio una pallina; al pulsante 2 corrisponde l’inchino.
I parametri settabili da programma sono simili a quelli del robot ArduFilippo:
int TimeOneStep = 4000;
int AmpPasso = 10;
int AmpRuota = 12;
int IncPasso = 8;
La modifica di questi parametri è associata alla costruzione meccanica (dipende ad esempio dalla ripartizione del peso delle batterie). Essendo il baricentro quasi tutto spostato verso l’alto, la struttura è comunque instabile e tende a cadere; i grandi piedi ed un movimento lento favoriscono la stabilità ma, se aumentate la velocità di esecuzione i movimenti diventano più bruschi ed il pericolo di cadute aumenta.





 €18,00 IVA inclusa
€18,00 IVA inclusa €8,00 IVA inclusa
€8,00 IVA inclusa