Non ci sono prodotti a carrello.
MODULO BUSSOLA CON COMPENSAZIONE DEL TILT

Gratuito
Modulo studiato appositamente come aiuto alla navigazione del vostro robot, impiega un magnetometro a 3 assi, un accelerometro a 3 assi e un microcontrollore a 16-bit per eliminare gli errori causati dall’inclinazione (Tilt) del PCB
| Modulo studiato appositamente come aiuto alla navigazione del vostro robot, impiega un magnetometro a 3 assi, un accelerometro a 3 assi e un microcontrollore a 16-bit per eliminare gli errori causati dall’inclinazione (Tilt) del PCB. L’uscita dei tre sensori di misura x, y e z insieme al beccheggio e rollio sono utilizzati per calcolare la direzione. La bussola può essere controllata tramite I2C, Seriale o PWM. | |
|
MODE SELECTION
|
|
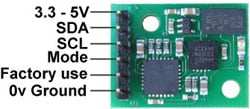 |
Per accedere alla modalità di funzionamento I2C rimuovere tutti i ponticelli.
|
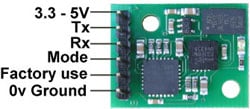 |
Per accedere alla modalità di funzionamento Seriale collegare il pin “Mode” a massa.
|
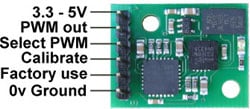 |
Per accedere alla modalità di funzionamento PWM
collegare il pin “PWM” a massa. |
|
|
|
|
SPECIFICHE TECNICHE
|
|
|
|
|
DOCUMENTAZIONE E LINK UTILI
|
|
|
|