Non ci sono prodotti a carrello.
Board quadricottero Open Source

€35,00 IVA inclusa
Scheda basata su Arduino Mega, che permette di gestire i motori di un quadricottero, ricevere i comandi da un radiocomando per aeromodelli e supportare la telemetria tramite smartphone
| Scheda basata su Arduino Mega, che permette di gestire i motori di un quadricottero, ricevere i comandi da un radiocomando per aeromodelli e supportare la telemetria tramite smartphone. Oltre all’Atmega 2560, programmato con il firmware open source denominato MultiWii (permette di controllare multicotteri, elicotteri ed aerei), dispone 8 uscite per motori, 8 ingressi per ricevitori RC standard e compatibile con ricevitori PPM, 4 porte seriali per debug/ Bluetooth Module/OSD/GPS/telemetria, 3 uscite servo per il controllo di un sistema gimbal (pitch, roll, trigger), I²C-Bus per aggiungere sensori o dispositivi, connettore per modulo GPS, compatibile con moduli IMU GY-521, GY-86 ed esterni, connettore per convertitore USB/seriale FTDI, uno stadio di alimentazione a 3,3V per eventuali dispositivi aggiuntivi e LED di segnalazione. L’altro elemento di fondamentale importanza è il modulo IMU (Inertial Measurement Unit, ovvero la piattaforma che rileva accelerazione, movimenti sui tre assi ecc.) disponibile separatamente e inseribile sull’apposito connettore della scheda. Sia la scheda che il software supportano diverse configurazioni di volo: da semplici aeromodelli a multirotori. La scheda premontata (solo la sezione SMD) non comprende il modulo IMU, i motori, le eliche, ecc (vedere prodotti correlati).
|
|
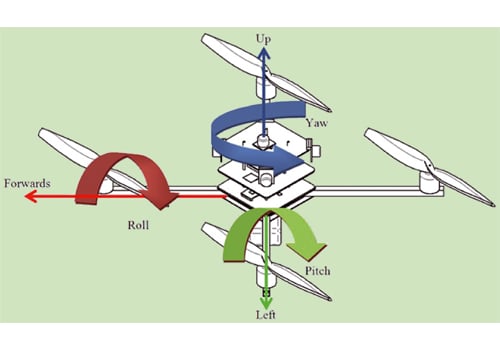
Terminologia del Volo
|
 |
|
|
Caricamento del BOOTLOADER e Test della scheda
|
|
Se il microcontrollore della scheda è sprovvisto di bootloader è necessario caricarlo; allo scopo potete usare un apposito programmatore o più semplicemente una scheda Arduino facente funzioni di programmatore. In quest’ultimo caso consultate la Tabella 2 per conoscere le connessioni da effettuare tra la scheda programmatore e la nostra. Poi aprite l’IDE di Arduino e caricate lo sketch di esempio denominato ArduinoISP.ino sulla Arduino usata come programmatore, quindi accedendo al menu Strumenti>tipo di Arduino impostate come scheda target “Arduino Mega 2560 or Mega ADK”; fatto ciò impostate Arduino come programmatore (Strumenti>Programmatore>Arduino as ISP) quindi avviate la programmazione con il comando Strumenti>Scrivi il Bootloader.
|
|
Il Firmware
|
|
Il firmware che gira all’interno della scheda non è dei più semplici:
|
| Documentazione Tecnica | |
| PDF italiano |
-
€21,00 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
 €1,30 IVA inclusa
€1,30 IVA inclusaDisponibilità immediata.
-
 €18,00 IVA inclusa
€18,00 IVA inclusaDisponibilità immediata.
-

-
 €37,00 IVA inclusa
€37,00 IVA inclusaDisponibilità immediata.
