Non ci sono prodotti a carrello.
Chassis Robot con Elettronica+Cingoli e Motori





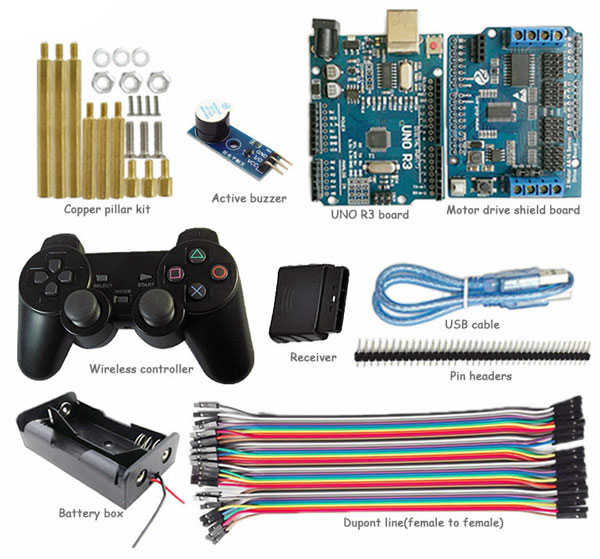
Set composto da un telaio in lega di alluminio, 2 cingoli larghi 45 mm, 2 motoriduttori con encoder ad effetto di Hall, una scheda Arduino compatibile, uno shield per 2 motori DC e 16 servi RC, un modulino con buzzer, un controller wireless a 2,4 GHz (compatibile Playstation 2) con il relativo ricevitore, 1 set di 40 cavetti femmina-femmina, un portabatteria per 2 batterie Li-Ion 18650 3,7V (non comprese) e un cavetto USB
|
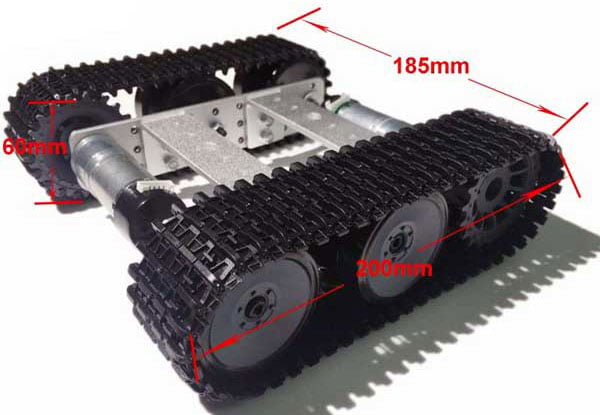
Set composto da un telaio in lega di alluminio, 2 cingoli larghi 45 mm, 2 motoriduttori con encoder ad effetto di Hall, una scheda Arduino compatibile, uno shield per 2 motori DC e 16 servi RC, un modulino con buzzer, un controller wireless a 2,4 GHz (compatibile Playstation 2) con il relativo ricevitore, 1 set di 40 cavetti femmina-femmina, un portabatteria per 2 batterie Li-Ion 18650 3,7V (non comprese) e un cavetto USB. Una volta assemblato permette di realizzare un robot cingolato, controllato tramite il controller wireless, in grado di muoversi su terreni accidentati e di trasportare un carico di circa 5 kg. Le sue dimensioni max. sono circa (mm): 200x185x60 (lunghezza x larghezza x altezza). |
|
 |
|
 |
|
 |
|
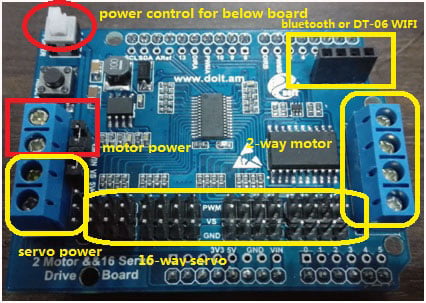
| Caratteristiche dello Shield per 2 motori DC e 16 servi RC | |
 |
|
|
Basato sul chip L293DD, questo shield permette di gestire 2 motori DC e 16 servi RC. La corrente massima disponibile è di 1,2 A. Sullo shield è presente un morsetto per l’alimentazione dei motori DC e uno per i servi RC, un connettore a 4 pin per l’utilizzo del modulo bluetooth HC-06 (non compreso – vedere prodotti correlati), interruttore on/off e pulsante di reset. I servi sono controllati tramite interfaccia I2C. Tramite i pin D6, D7, D11 e D12 di Arduino o compatibile, vengono controllati i due motori DC. PWMB (velocità motore B), DIRB (direzione di rotazione motore B), PWMA (velocità motore A) e DIRA (direzione di rotazione motore B). Oltre ad essere impiegato nel cingolato, questo shield può anche essere utilizzato per gestire un braccio robotico o altro. |
|
| Caratteristiche Motori | |
|
|
| Documentazione e link utili | |
-
 €8,00 IVA inclusa
€8,00 IVA inclusaDisponibilità immediata.
-
€7,50 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
 €9,00 IVA inclusa
€9,00 IVA inclusaDisponibilità immediata.
-
 €9,00 IVA inclusa
€9,00 IVA inclusaDisponibilità immediata.
-

-
 €9,90 IVA inclusa
€9,90 IVA inclusaDisponibilità immediata.
-
 €7,50 IVA inclusa
€7,50 IVA inclusaDisponibilità immediata.
-
 €11,00 IVA inclusa
€11,00 IVA inclusaDisponibilità immediata.
