High Side Driver per Sistema Mercury




€25,00 IVA inclusa
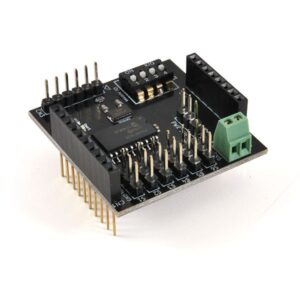
Scheda HSD (High Side Driver) a 4 canali, in grado di controllare un carico fino a 1 A per canale
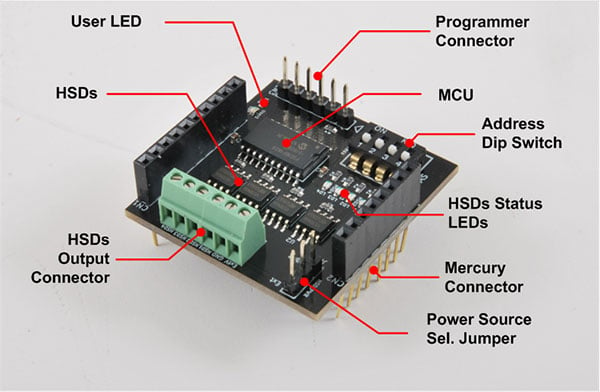
| Scheda HSD (High Side Driver) a 4 canali, in grado di controllare un carico fino a 1 A per canale. La board va collegata alla Base Board (BB) del sistema Mercury tramite I2C bus. L’indirizzo della board può essere impostata dinamicamente tramite il dip switch a 4 interruttori che permette di ottenere fino a 15 indirizzi differenti (l’indirizzo 0x00 è riservato al bus I2C). La board è dotata di jumper che consente di selezionare la fonte di alimentazione: interna (VBat) oppure esterna tramite l’apposito morsetto . Il cuore del sistema è un microcontrollore RISC PIC16F1829 a 8 bit, prodotto da Microchip Technology Inc. | |||||||||||||
| Caratteristiche Board | |||||||||||||
|
|||||||||||||
| Caratteristiche hardware | |||||||||||||
 |
|||||||||||||
|
|||||||||||||
| Caratteristiche microcontrollore | |||||||||||||
|
|||||||||||||
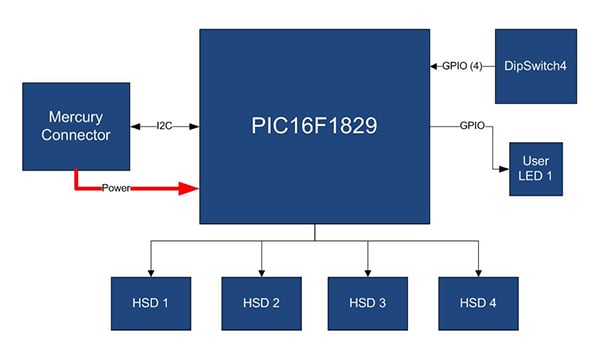
| Schema hardware | |||||||||||||
 |
|||||||||||||
| Mercury System | |||||||||||||
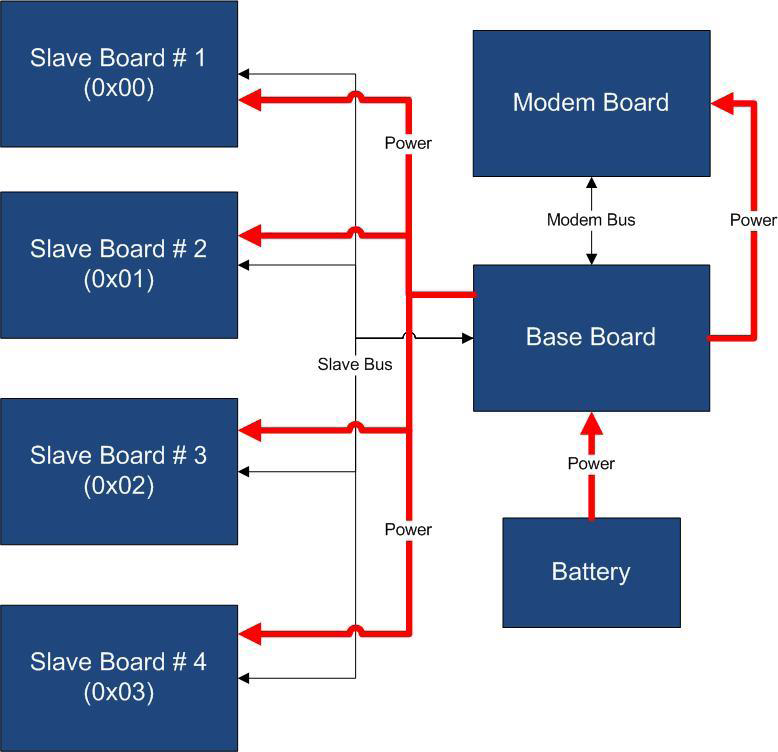
| Mercury System (in breve, MS) è un sistema modulare per lo sviluppo di connettività e applicazioni IoT. Il sistema utilizza vari tipi di schede elettroniche (unità logica, modem, scheda slave dotata di sensori e attuatori, schede di potenza …) e una completa struttura SW che permette la realizzazione di applicazioni complesse. Scalabilità, facilità d’uso e modularità sono fattori chiave e sono garantiti dall’uso di un insieme eterogeneo di componenti che consentono di assemblare il sistema come una costruzione realizzata con mattoncini LEGO©.
Il set di schede che compone il Sistema Mercury è costituito dalle seguenti “famiglie”: • Base Board (BB): È il “cervello” di tutto il Sistema Mercury e contiene l’unità logica principale, diversi bus di comunicazione e i connettori per interfacciare gli slave. Contiene inoltre un semplice sistema di alimentazione e un’unità di ricarica per una singola cella LiPo (in grado di soddisfare i requisiti di alimentazione di sistemi più semplici). Può esistere in diverse varianti, a seconda dell’unità di microcontrollore utilizzata. • Modem Board (MB): questa è la scheda che consente la connettività di rete. Può esistere in diverse varianti, a seconda dell’interfaccia di rete (GSM / GPRS, Wi-Fi, BT, Radio …). È interfacciata alla scheda base con una linea seriale dedicata. • Power Board (PB): è la scheda che consente di soddisfare il particolare fabbisogno energetico del sistema, quando è necessario. Possono variare a seconda del particolare fabbisogno energetico da soddisfare (alta potenza, raccolta solare, raccolta piezoelettrica, ecc.). • Slave Board (SB): sono le periferiche del sistema e variano a seconda del sensore o dell’attuatore montato specifico. Esempi tipici sono SB con relè, sensori di temperatura, controller LED RGB, servoregolatore, accelerometro, ecc. Comunicano con il BB con I2C o UART e un set di comandi dedicato. • Expansion Board (EB): sono le schede che consentono la connessione planare delle schede Mercury. Ci sono varianti che possono contenere display, porta batteria, ecc. • Brain-Less Board (BL): queste sono le schede senza controller. In generale contengono sensori o attuatori veramente semplici che non necessitano dell’interfaccia bus. Sono un’alternativa alle schede slave per applicazioni che richiedono costi contenuti. Le Slave Board e le Modem Board sono pre-programmate con un Firmware che implementa un set di comandi dedicato per una gestione di alto livello, mentre le Base Board sono dotate di un framework Software che fornisce tutti i servizi di basso livello (sistema operativo, driver di periferica, servizi di sistema, ecc.), lasciando all’utente solo lo sviluppo della logica a livello di applicazione. |
|||||||||||||
 |
|||||||||||||
| Mercury System Framework | |||||||||||||
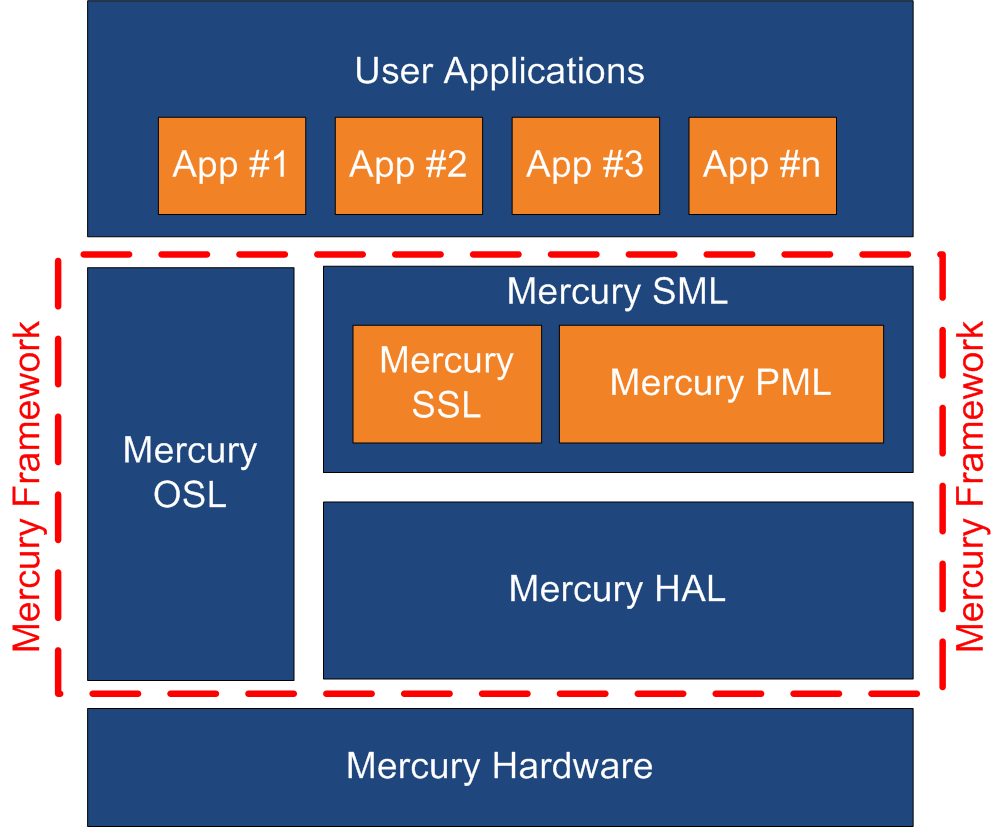
| Mercury System Framework (MSF) è un framework Software stratificato appositamente progettato per supportare lo sviluppo di applicazioni con il Sistema Mercury. Fornisce all’utente un set completo di funzionalità di base per interfacciare facilmente le Slave Board (SB) e le Modem Board (MB) così come alcuni servizi di sistema Software e infrastrutturali. | |||||||||||||
 |
|||||||||||||
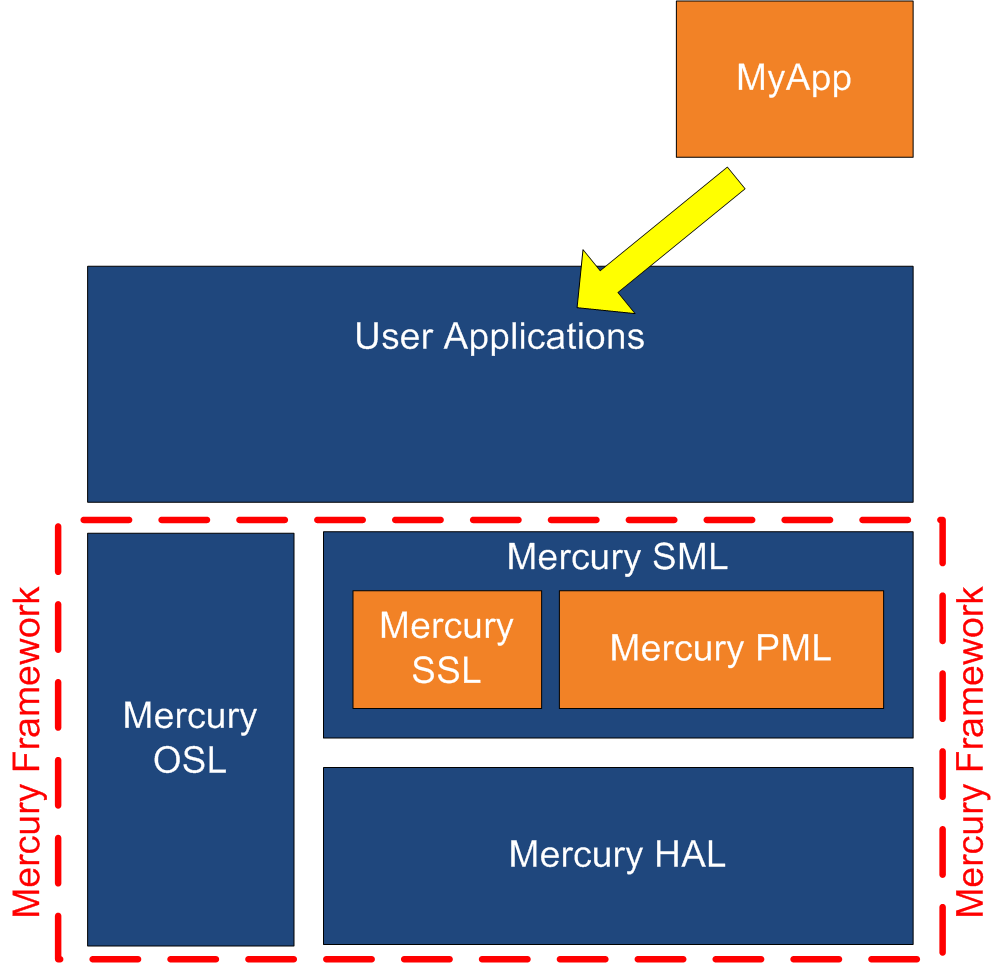
| Il framework è costituito dai seguenti componenti:
HAL (Hardware Abstraction Layer): lo scopo di questo livello è di astrarre le dipendenze Hardware ai livelli superiori.
OSL (Operative System Layer): questo layer è costituito da un RTOS leggero che fornisce servizi di base al sistema, come le tabelle di pianificazione per le varie attività, eventi, timer SW, allarmi, ecc. |
|||||||||||||
 |
|||||||||||||
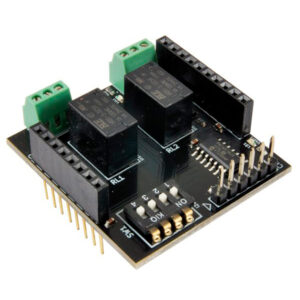
| Le Schede Slave del Sistema Mercury | |||||||||||||
| Il layout delle schede Mercury Slave è standardizzato, al fine di semplificare l’interfacciamento con la Base Board e garantire un alto livello di modularità e scalabilità. Ogni scheda slave è dotata di una linea di comunicazione I2C (Inter Integrated Circuit) e di un dip-switch a quattro posizioni per impostare dinamicamente l’indirizzo bus della scheda slave. Gli indirizzi da 0x01 a 0x0F sono disponibili per gli Slave, mentre l’indirizzo 0x00 è riservato per le comunicazioni broadcast. In questo modo è possibile collegare fino a 15 dispositivi alla Base Board utilizzando lo schema di indirizzamento dinamico. Questo numero può essere persino aumentato riprogrammando lo Slave con un indirizzo fornito dal software. Inoltre, due linee digitali open collector collegate agli interrupt esterni della scheda base sono fornite per le schede slave che devono fornire interrupt asincroni. Inoltre, le schede slave che richiedono una larghezza di banda più elevata e la comunicazione peer-to-peer possono essere interfacciate utilizzando un ulteriore canale UART.
Esistono diverse sottofamiglie di Slave Board:
La Tabella seguente fornisce alcuni esempi per ogni sottofamiglia:
|
|||||||||||||
| Documentazione e link utili | |||||||||||||