Non ci sono prodotti a carrello.
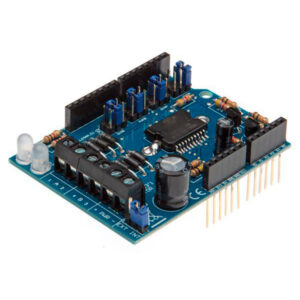
MOWERSHIELD_FE Shield per Robot rasaerba




Il Mowershield_FE, abbinato ad Arduino UNO e al Motorshield, permette di gestire un robot rasaerba
| Il Mowershield_FE, abbinato ad Arduino UNO e al Motorshield, permette di gestire un robot rasaerba. I motori del robot rasaerba sono gestiti dal Motorshield, mentre il Mowershield_FE controlla la batteria, un pannello solare, due sensori ad ultrasuoni, un display LCD, le bobine per il rilevamento del filo interrato (1mH), due microswitch, il contatto reed della ruota pivotante posteriore, l’ESC che controlla il motore brushless per il taglio dell’erba, l’interruttore on/off e tre pulsanti per usi generici.
Il Mowershield è dotato di due integrati ACS712 che permettono di misurare la corrente fornita dal pannello solare e la corrente assorbita dal motore di taglio. La possibilità di misurare la corrente del pannello solare è fondamentale per rilevare la zona più idonea per la ricarica della batteria: infatti durante il funzionamento viene memorizzato il livello di corrente fornito dal pannello, dato riutilizzato successivamente quando il tagliaerba dovrà trovare una zona di ricarica qualora la batteria risultasse quasi scarica. La misura della corrente assorbita dal motore del taglio serve per conoscere lo sforzo durante il taglio ed è fondamentale per prevedere l’arresto del taglio in situazione di anomalia. Un reed posizionato a ridosso della ruota pivotante posteriore permette di determinare se il robot si muove regolarmente oppure una o più ruote risultano bloccate o girano a vuoto. I due microswitch (posti frontalmente sul robot) insieme ai due sensori ad ultrasuoni, servono per il riconoscimento degli ostacoli. I microswitch servono perché i sensori ad ultrasuoni potrebbero essere ingannati da oggetti dalla superficie particolarmente ridotta come una rete metallica o da oggetti molto frastagliati come un cespuglio. Per il taglio dell’erba si utilizza un motore di tipo brushless per impieghi in ambito aeromodellistico, al quale è abbinata una lama da taglio realizzata accoppiando due lame da cutter e avvitandole su un mozzo a vite. |
|
N.B. lo shield viene fornito con tutti i componenti saldati ad eccezione degli strip per Arduino. Per poter realizzare il progetto rasaerba qui proposto, è possibile acquistare il seguente materiale presente a catalogo: |
|
Schema d’insieme del rasaerba
|
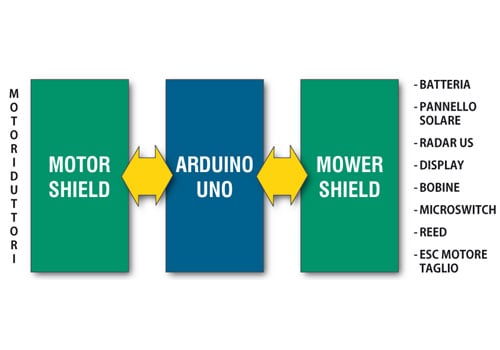 |
| L’elettronica del robot è composta da Arduino UNO su cui sono applicati un Motorshield e il Mowershield_FE: al primo si collegano i motoriduttori delle ruote, al secondo tutto il resto. |
|
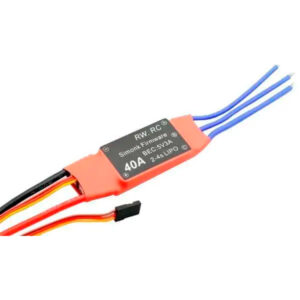
Il motore brushless
|
| Il motore è da 200 W ma viene utilizzato per non più del 20 % in quanto, la sua massima potenza, è consentita solo quando è installato a bordo di un aeromodello in cui è assicurata un’elevata ventilazione; all’interno di una scatola, per di più in pieno sole, non possiamo pretendere di più. Il controllo del motore è affidato ad un ESC (Electronic Speed Control) del tipo usato in modellismo, che si comanda con un semplice segnale PWM, facilmente gestibile con Arduino, perché è già presente la relativa funzione nella libreria di sistema. |
|
Il recinto per il robot rasaerba
|
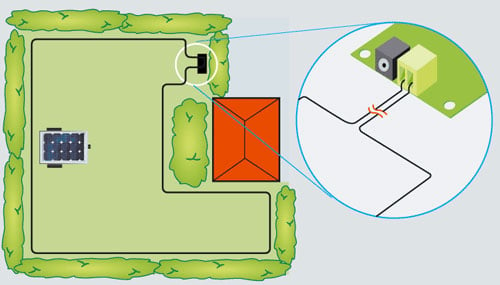 |
| Il recinto entro cui il rasaerba si sposterà si definisce posando (interrato di qualche centimetro ad evitare che le ruote o la lama lo tocchino) sotto l’erba un filo elettrico che parte da uno dei morsetti del circuito generatore e si chiude sull’altro, a formare un anello. In questo modo, la corrente nel filo indurrà nei dintorni un campo elettromagnetico a 34 kHz, rilevabile dalle induttanze (1mH) del rasaerba (che sono poste nella parte più bassa della scocca). |
|
Documentazione e link utili
|
Questa versione del firmware sfrutta il Display in I2C, pertanto il display dovrà essere collegato direttamente ai pin sulla shield dedicati alla comunicazione I2C (SDA e SCL).
|
| Documentazione Tecnica | |
| PDF italiano |
-

-
 €18,00 IVA inclusa
€18,00 IVA inclusaDisponibilità immediata.
-
€26,50 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
€37,00 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
 €6,00 IVA inclusa
€6,00 IVA inclusaDisponibilità immediata.
-

-

-

-
-