Non ci sono prodotti a carrello.
Il timer 555 è un circuito integrato temporizzatore a 8 pin con più di 40 anni di progetti alle spalle. Nonostante la sua età è sempre attuale e tutt’oggi trova spazio in moltissime applicazioni, anche grazie alla sua semplicità d’uso. Il famoso 555 ha anche un fratello maggiore, il 556 che integra, all’interno del suo case, due timer. In Fig. 1 abbiamo riportato i principali Costruttori di questo circuito integrato e le relative sigle, alcuni non lo producono più, altri lo hanno addirittura rinnovato potenziandolo in alcune caratteristiche, come l’aumento della frequenza massima e la diminuzione dei consumi. Il suo nome deriva dal valore dei tre resistori interni collegati ai due comparatori, che sono tutti da 5 kΩ. A seconda dei modelli può operare con tensioni tra 1,5 V e 18 V, con frequenze da 100 kHz a 3 MHz e può erogare correnti massime tra 50 mA e 200 mA.
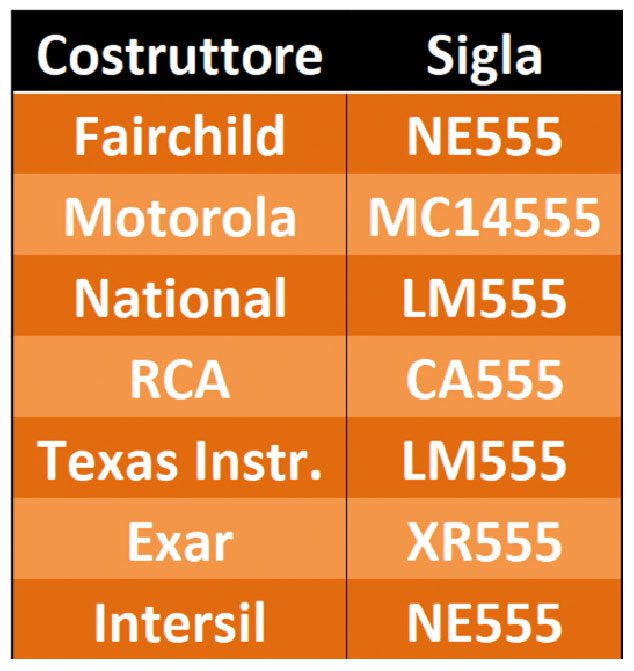
Fig. 1
In Fig. 2 abbiamo illustrato il suo schema interno funzionale e la piedinatura. Esso è costituito fondamentalmente da due comparatori, un LATCH ASINCRONO SET-RESET, un buffer negato ed un transistor NPN (nei modelli più recenti è un mosfet a canale N) in configurazione interruttore. I tre resistori uguali da 5k costituiscono un partitore di tensione che ha lo scopo di fornire le tensioni di riferimento ai comparatori di SOGLIA (2/3 di VCC) e di TRIGGER (1/3 di VCC).
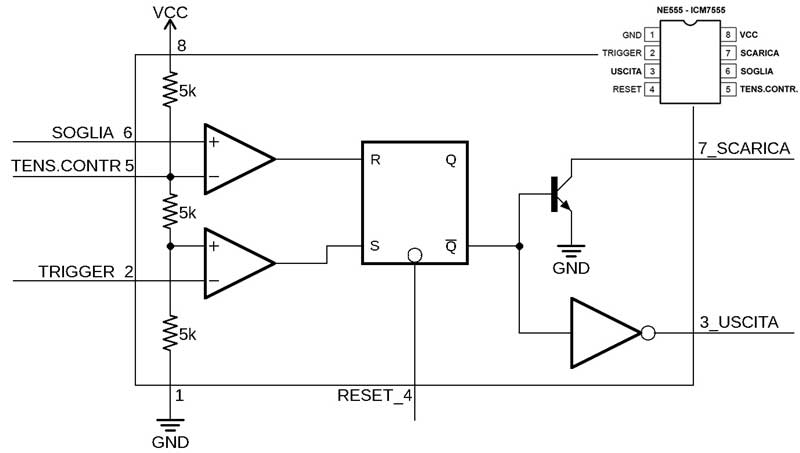 Fig. 2
Fig. 2
Le uscite dei due comparatori sono applicate in ingresso ad un LATCH ASINCRONO DI TIPO SET-RESET, che è un circuito logico con due ingressi (S e R) e due uscite (Q e Q’); nel 555 è utilizzata solo l’uscita Q’ (Q negato), che è collegata ad un transistor NPN e ad una porta NOT che funge da buffer invertente. In pratica se l’uscita Q’ si trova a livello L (0 V) il transistor si trova in OFF ed il pin 7 risulta flottante, mentre la porta NOT inverte lo stato di Q’ ed il pin 3 (uscita del 555) si trova a livello H (VCC). Se invece l’uscita Q’ si trova a livello H, il transistor va in ON ed il pin 7 viene collegato a massa, mentre la porta NOT, invertendo lo stato di Q’ porta il pin 3 a livello L (0 V). Il comparatore inferiore ha l’ingresso non invertente collegato a 1/3 VCC; quando la tensione sul pin di TRIGGER (pin 2) è maggiore di 1/3 VCC l’uscita di questo comparatore (ingresso S del LATCH) si porta a livello logico basso (L); se invece la tensione sul pin di TRIGGER è inferiore a 1/3 VCC l’uscita del secondo comparatore si porta a livello alto (H).
Il comparatore superiore ha l’ingresso invertente collegato a 2/3 VCC, questa tensione di riferimento è misurabile esternamente sul pin 5. Quando la tensione sul pin di SOGLIA (6) è maggiore di 2/3 VCC l’uscita di questo comparatore (ingresso R del LATCH) si porta a livello logico alto (H); se invece la tensione sul pin di SOGLIA è minore di 2/3 VCC l’uscita del primo comparatore si porta a livello basso (L). Vediamo ora come vengono gestiti i pin 3 (USCITA) e 7 (SCARICA), in relazione allo stato degli ingressi SOGLIA (pin 6) e TRIGGER (pin 2). Per semplicità abbiamo riportato tale comportamento nella tabella visibile in Fig. 3.
 Fig. 3
Fig. 3
Come si può notare, il pin 4 (RESET del 555) se posto a livello logico basso, fissa l’uscita (pin 3) su L e le tensioni o segnali applicati sui pin SOGLIA e TRIGGER vengono ignorati, quindi questo pin può essere utilizzato per bloccare temporaneamente l’attività del 555. Se invece viene fissato su H (collegandolo all’alimentazione del circuito) abbiamo tre possibili condizioni:
- TRIGGER < 1/3 VCC: SCARICA OFF (quindi scollegata dalla massa) e USCITA H (poco meno di VCC), il livello di tensione applicato sul pin SOGLIA è irrilevante;
- TRIGGER > 1/3 VCC e SOGLIA > 2/3 VCC: SCARICA ON (quindi collegata a massa) e USCITA L (circa 0 V);
- TRIGGER > 1/3 VCC e SOGLIA < 2/3 VCC: SCARICA e USCITA non cambiano lo stato attuale.
Quindi, ovviamente, il comportamento dei due pin di uscita del 555 dipende dallo stato dei pin di ingresso. Le tre colonne centrali della tabella (S, R e Q’) rappresentano il comportamento del solo LATCH interno, secondo la tipica tabella delle transizioni.
I riferimenti del comparatore sono espressi in frazioni di VCC, in quanto l’alimentazione, come abbiamo detto, ha un elevato range di valori e quindi questi riferimenti variano al variare dell’alimentazione. In genere i riferimenti di tensione dei tre resistori vanno bene per qualsiasi applicazione, in tal caso conviene applicare al pin 5 (TENSIONE CONTROLLO) un condensatore da 10 nF verso massa, in modo da bloccare eventuali disturbi circuitali che potrebbero influenzare le tre tensioni di riferimento. In caso di particolari necessità si può collegare a questo pin un resistore verso il positivo di alimentazione o verso massa per ottenere rispettivamente tensioni di riferimento maggiori o minori per i due comparatori.
Il timer 555 può essere utilizzato come multivibratore astabile, monostabile o bistabile. Vediamo assieme le diverse configurazioni di base.
Multivibratore astabile
La Fig. 4 mostra la tipologia base del multivibratore astabile, in cui i tre componenti fondamentali sono i due resistori RA e RB ed il condensatore CX; il C1 (10 nF) è il filtro antidisturbo di cui abbiamo già parlato, mentre i resistori R1, R2 ed i LED LD1, LD2 servono per visualizzare il comportamento del circuito, in mancanza di un oscilloscopio. Infatti LD1 (rosso) si accende quando l’USCITA del 555 è in fase L, mentre LD2 (blu) si accende quando l’USCITA del 555 è in fase H.
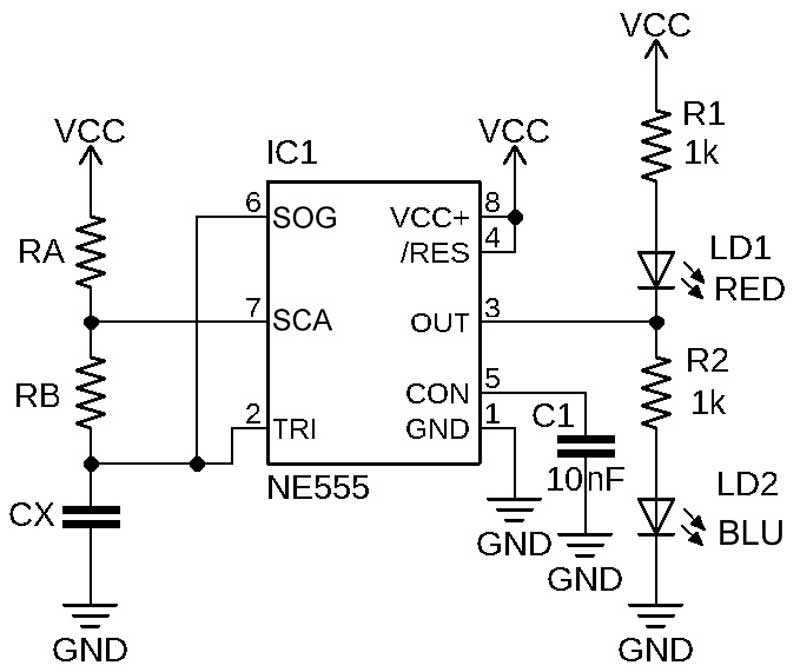 Fig. 4
Fig. 4
Da notare che i due ingressi del comparatore, TRIGGER e SOGLIA, sono collegati assieme, e ciò comporta che siano costantemente allo stesso livello di tensione, durante il funzionamento, per cui si possono verificare solo le condizioni 1 e 2, descritte in precedenza. Al momento dell’accensione del circuito CX è scarico, quindi il TRIGGER si trova ad un livello inferiore ad 1/3 VCC e, come visto, l’USCITA è alta (H), con conseguente accensione di LD2. Poiché contemporaneamente il pin SCARICA è scollegato dalla massa, inizia la carica del condensatore CX, mediante la corrente che passa attraverso RA ed RB, e la tensione sugli ingressi inizia gradualmente a salire; quando essa supera i 2/3 VCC l’USCITA diventa bassa (L), con conseguente spegnimento di LD2 ed accensione di LD1; inoltre ora il pin SCARICA viene collegato alla massa e CX inizia a scaricarsi attraverso la sola resistenza RB, e la tensione sugli ingressi ricomincia a diminuire. Quando essa scende nuovamente sotto 1/3 VCC l’uscita ritorna alta (H), per cui è evidente che si ha un funzionamento a ciclo continuo, con alternanza degli stati alto e basso dell’USCITA; quindi le due condizioni sono instabili, ed è questa la ragione per la quale questo tipo di configurazione viene definita ASTABILE. Questo significa che ci troviamo in presenza di un circuito oscillatore con due stadi H-L ben definiti, e quindi parliamo di un’onda quadra. A questo punto bisogna capire come variano la durata del ciclo H-L ed il rapporto tra le due fasi H e L, nel primo caso si tratta della frequenza del segnale in uscita, nel secondo del suo Duty Cycle, definiremo le due fasi tH e tL. Possiamo ricavare le formule per il calcolo di questi valori direttamente dal datasheet dell’integrato, reperibile cliccando qui.
tH = 0,693 * (RA + RB) * CX
tL = 0,693 * (RB) * CX
Risulta evidente la correlazione tra queste due formule e quanto affermato in precedenza, cioè che la fase H dipende dalla carica del condensatore CX attraverso i resistori RA e RB, mentre la fase L dipende dalla scarica del condensatore CX attraverso il solo resistore RB. Queste relazioni sono chiaramente visibili in Fig. 5 in cui l’onda quadra è prelevata sul pin USCITA e quella pseudotriangolare sui pin SOGLIA-TRIGGER; quest’ultima rappresenta appunto le fasi di carica (ascendente) e di scarica (discendente) del condensatore.
Il periodo T del segnale generato (ciclo H-L) è dato dalla somma delle due fasi, quindi:
T=tH+tL=0,693*(RA+RB)*CX+0,693*RB*CX=0,693*
(RA+2RB)*CX
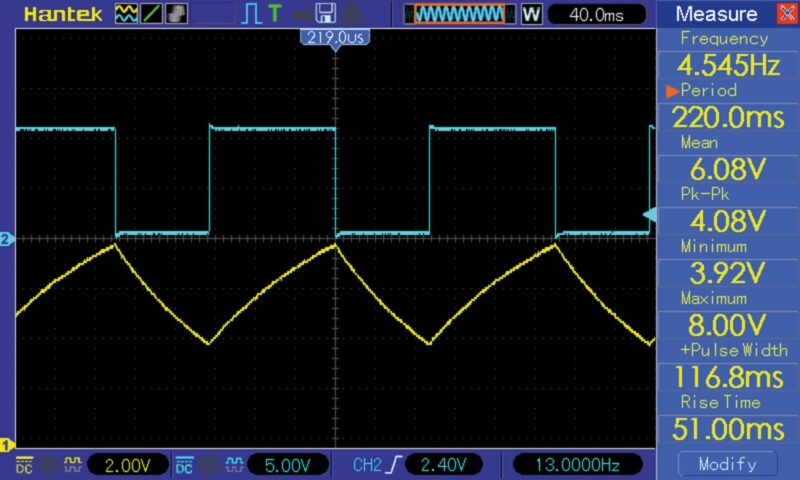
Fig. 5
La frequenza f è l’inverso del periodo quindi:

Il Duty Cycle è dato dal rapporto percentuale tra tH e tH + tL, cioè tra la fase H e l’intero ciclo del segnale (T), quindi:

In condizioni normali il tH è sempre più lungo del tL e l’onda non sarà mai perfettamente simmetrica; come vedremo più avanti, un particolare tipo di configurazione monostabile consente di ottenere la condizione di Duty Cycle al 50%, mentre in un prossimo articolo vedremo anche una configurazione astabile per ottenere lo stesso risultato.
Da quanto visto finora è chiaro che se in un circuito basato sul 555 si conoscono i valori dei tre componenti passivi RA, RB e CX, è facile ricavare periodo, frequenza e Duty Cycle. Se invece bisogna realizzare un circuito ex-novo, per ottenere la frequenza ed il Duty Cycle desiderati, occorre operare con le formule inverse. Per esempio per ottenere un’onda quadra con frequenza di 100 Hz e Duty Cycle al 55%, la prima operazione da fare è stabilire la capacità CX da adottare, un qualsiasi valore da 1 nF a 100 µF. In linea di massima per la scelta dei componenti è consigliabile far riferimento al grafico presente sul datasheet, che abbiamo riportato in Fig. 6.
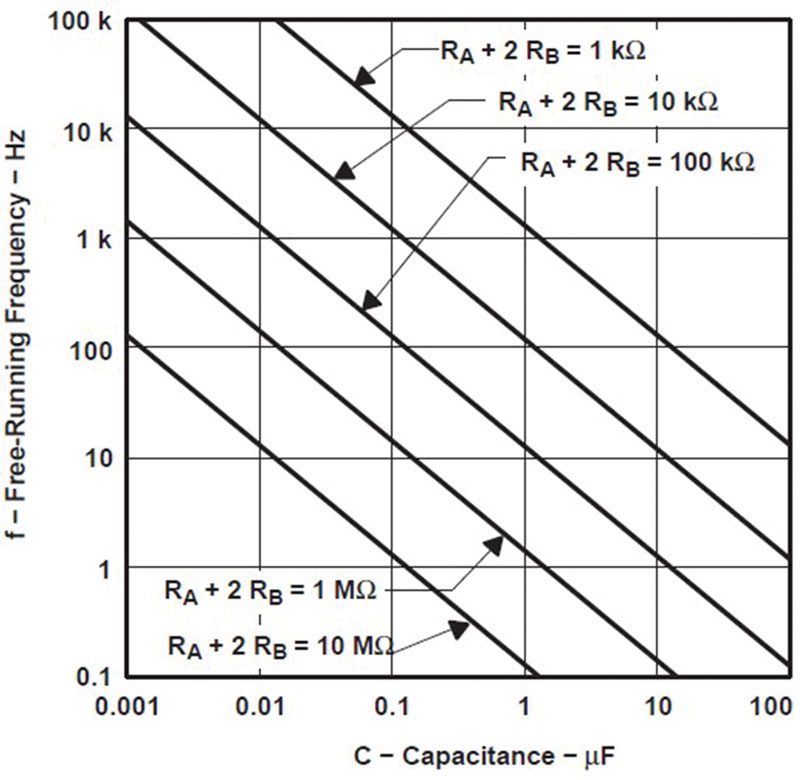
Fig. 6
Il grafico presenta sull’asse X il range di valori per la capacità di CX (da 1 nF a 100 µF), sull’asse Y il range della frequenza generabile dal modello di 555 a cui si riferisce il datasheet (nel caso del modello base varia da 0,1 Hz a 100 kHz); vi sono poi cinque linee oblique, parallele tra loro, ognuna delle quali rappresenta una combinazione RA+2RB (da 1 kΩ a 10 MΩ). Vediamo come si usa questo grafico: una volta stabilita la frequenza da ottenere (nel nostro caso 100 Hz), è consigliabile scegliere una capacità che coincida con la linea della frequenza nell’area centrale del grafico (in questo caso tra 100 nF e 1 µF, scegliamo 1 µF), infine si localizza la linea obliqua più vicina al punto di incrocio tra la linea orizzontale della frequenza e quella verticale della capacità, in questo caso la RA+2RB = 10 kΩ. Nell’esecuzione delle formule bisogna tener presente che la capacità va sempre espressa in µF (p.es. 100 nF = 0,1 µF) e la resistenza va sempre espressa in kΩ. Il tempo totale T del ciclo è dato dall’inverso della frequenza, quindi:
il tH si ricava dalla formula del Duty Cycle, quindi: tH=D.C.%*T=55⁄100*0,01=0,0055s
Il tL si ricava per differenza: tL=T-tH=0,01-0,0055=0,0045s.
Ora che abbiamo tutte le tempistiche, diventa abbastanza semplice ricavare i valori dei due resistori, per comodità trasformiamo i periodi in ms, quindi: T=10ms,tH=5,5ms,tL=4,5ms. Iniziamo da RB, ricavabile dalla formula del tL:
![]()
Ora che conosciamo RB possiamo calcolare RA a partire da tH:
![]()
Eseguendo la formula RA + 2RB = 1,44 + (2*6,49) = 14,42, possiamo notare che il risultato è compatibile con l’intersezione delle tre linee del grafico.
Naturalmente queste formule spessissimo danno come risultato valori di RA ed RB difficilmente reperibili in commercio, come in questo caso; inoltre c’è da considerare che i condensatori in genere hanno tolleranze elevate, dell’ordine del 5-10-20%, quindi non sarà mai facile ottenere nel circuito i valori ipotizzati. Vediamo cosa succede simulando una tolleranza del condensatore del -5% e adottando per RA un valore commerciale di 6,2 kΩ 1% e per RB 1,5 kΩ 1%. Li inseriamo nelle formule iniziali ed otterremo: Frequenza 109,3 Hz (100), T=9,15 ms (10), tH=5,07 ms (5,50), tL=4,08 ms (4,50), D.C.=55,4% (55); i valori tra parentesi sono quelli teorici, quindi possiamo notare un discreto discostamento; se è accettabile per i nostri scopi va bene così, in caso contrario bisogna procedere in modo diverso, misurando la capacità del condensatore con un buon capacimetro e ricalcolando i resistori con la seconda serie di formule; a quel punto occorrerà ottenere i valori ricavati dalle formule mediante l’uso di più resistori in serie/parallelo, oppure sostituire RA ed RB con due trimmer di precisione, configurati come reostati, e regolarli in modo da ottenere i valori desiderati. Torniamo al nostro circuito valutando la prima ipotesi. Per ottenere una frequenza da 100 Hz ed un D.C. del 55%, se il CX risulta avere una capacità di 0,95 µF, le formule ci restituiranno: RA=1,52 kΩ ed RB=6,84 kΩ. Nel primo caso ci servono un resistore da 1,5 kΩ ed uno da 22 Ω da mettere in serie, ottenendo 1,522 kΩ, nel secondo caso possiamo mettere in serie un resistore da 6,8 kΩ ed uno da 39 Ω, ottenendo 6,839 kΩ. Tutti i resistori dovranno essere di precisione con l’1% di tolleranza (banda finale marrone), meglio ancora se è lo 0,5% (banda finale verde).
Se andiamo a verificare ora questi ultimi valori con la prima serie di formule otteniamo: Frequenza 99,93 Hz (100), T=10,00 ms (10), tH=5,50 ms (5,50), tL=4,50 ms (4,50), D.C.=55,0% (55); in pratica ci mancano solo 70 mHz di frequenza, mentre tutti gli altri valori combaciano alla perfezione, certamente una condizione eccellente.
Per comodità riepiloghiamo nella Tabella 1 tutte le formule utili ai calcoli per i circuiti astabili con 555.
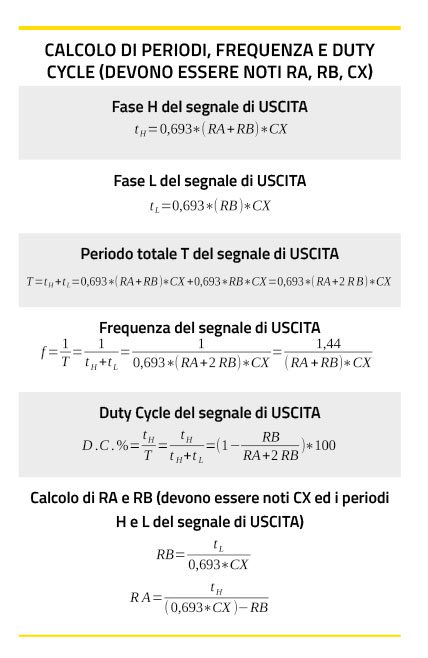
Tabella 1
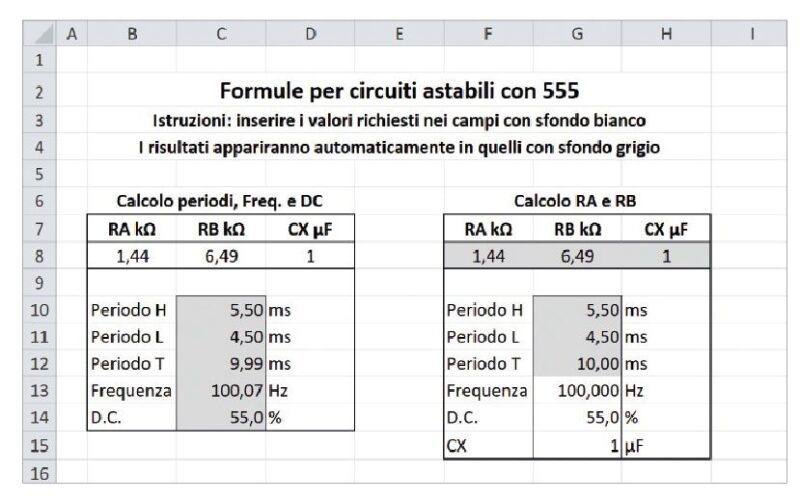
Fig. 7
Comunque il fatto di saper ora effettuare i necessari calcoli per i nostri circuiti non significa che non possiamo agevolarci la vita; allo scopo abbiamo preparato un file di Excel, scaricabile nella sezione download a fine pagina, con tutte le formule preimpostate, in Fig. 7 sono visibili i riquadri con le formule per i circuiti astabili.
Multivibratore MONOSTABILE
La Fig. 8 mostra la tipologia base del multivibratore monostabile, in cui i due componenti fondamentali sono il resistore RX, il condensatore CX e lo switch S1; il C1 (10 nF) è il solito filtro antidisturbo, il resistore R1 ha la funzione di pullup, mentre i resistori R2 e R3 ed i LED LD1 e LD2 servono per visualizzare il comportamento del circuito, come nella situazione precedente. Da notare che in questo caso l’ingresso SOGLIA è scollegato dal TRIGGER ed è invece collegato al pin SCARICA. Al momento dell’accensione il TRIGGER si trova ad un livello maggiore di 1/3 VCC a causa del resistore di pullup e, come visto, l’USCITA è bassa (L), con conseguente accensione di LD1. Contestualmente il pin SCARICA è collegato a massa, mantiene a livello L anche il pin SOGLIA ed impedisce al condensatore CX di caricarsi, in quanto la corrente che attraversa R1 finisce direttamente a massa. Nel momento in cui si preme il pulsante S1, il TRIGGER viene cortocircuitato a massa, quindi va ad un livello inferiore a 1/3 VCC, l’USCITA diventa alta (H), si spegne LD1 e si accende LD2; il pin SCARICA viene scollegato dalla massa e la corrente che attraversa RX inizia a caricare il condensatore CX e la tensione sulla SOGLIA inizia gradualmente a salire. Rilasciando il pulsante il TRIGGER ritorna a livello maggiore di 1/3 VCC.
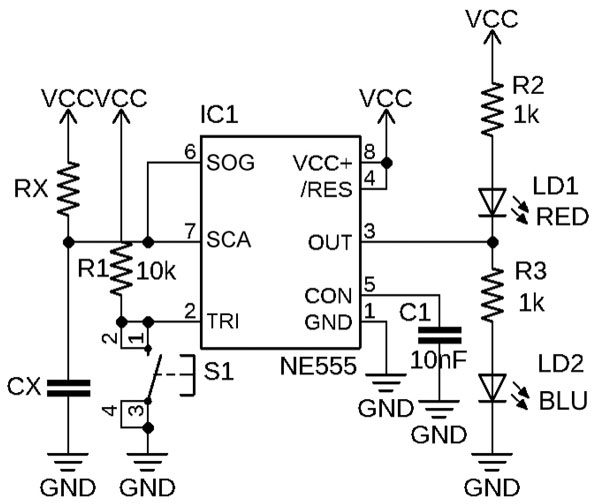
Fig. 8
Durante tutta la fase di carica l’USCITA si mantiene alta, in quanto, come abbiamo visto, la combinazione TRIGGER > 1/3 VCC e SOGLIA < 2/3 VCC non provoca modifiche di stato del LATCH. Nel momento in cui il condensatore è abbastanza carico da avere ai suoi capi (e quindi sulla SOGLIA) una tensione maggiore di 2/3 VCC, avviene la nuova commutazione dell’USCITA a livello basso (L) ed il condensatore si scarica istantaneamente attraverso il pin SCARICA, ora collegato nuovamente a massa; tale condizione resterà stabile fino ad una nuova pressione del pulsante. Riepilogando, mentre lo stato di USCITA bassa è stabile, quello di USCITA alta è instabile, in quanto dipendente dalla costante di tempo risultante dai valori di RX e CX. Ecco la ragione per la quale questo tipo di configurazione viene definita MONOSTABILE.
Naturalmente in questo caso non abbiamo da calcolare i valori di un segnale, in quanto esso si riduce ad un solo periodo H (tH) dipendente dalla formula: tH=1,1*RX*CX. La Fig. 9 illustra appunto la larghezza dell’impulso H in funzione dell’andamento della carica del condensatore. La differenza che salta subito all’occhio, rispetto alla configurazione astabile, è l’immediata scarica del condensatore nel momento in cui avviene il cambio di stato dell’USCITA; ciò è naturalmente dovuto al fatto che il condensatore è direttamente collegato al pin SCARICA e quindi viene cortocircuitato a massa senza limitazioni di corrente.
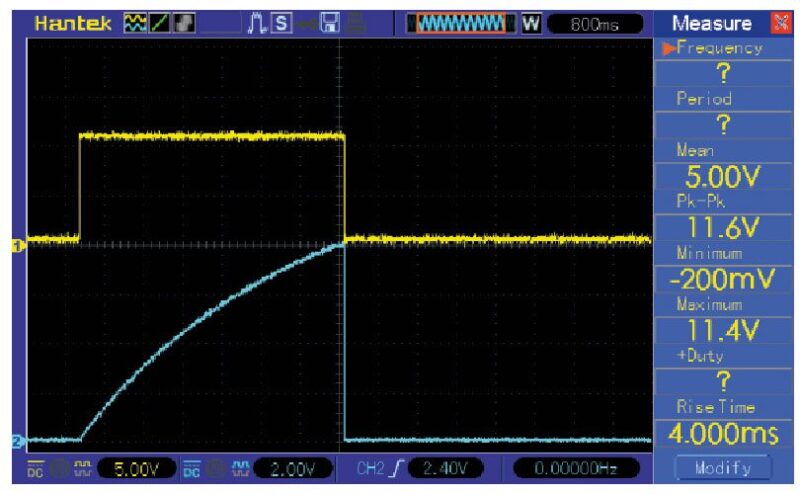
Fig. 9
Anche in questo caso, se ci si trova di fronte ad un circuito già realizzato, basta inserire nella formula i valori dei due componenti RX e CX; se invece siamo in fase di progettazione, occorre stabilire a priori il valore di uno dei due componenti (in genere il CX) e poi ricavarsi l’altro con la formula inversa. Un esempio chiarirà sicuramente le idee. Supponiamo di avere uno schema monostabile con RX=47 kΩ e CX=100 µF, la formula ci dice che la durata dell’impulso è: tH=1,1*RX*CX=1,1*47*100=5170ms (5,17 s). Se invece avessimo necessità di realizzare un circuito che fornisca un impulso di 50 ms, al solito dovremo scegliere la capacità basandoci sul grafico fornito dal datasheet, che è diverso da quello visto per i circuiti astabili. Infatti In Fig. 10 possiamo notare il consueto asse X con le capacità, mentre l’asse Y riporta il periodo dell’impulso e non la frequenza del segnale, come nel grafico precedente.
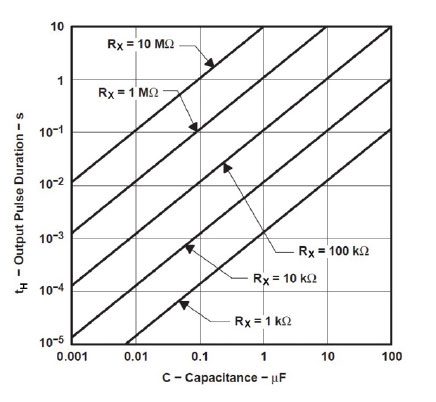
Fig. 10
Il range del periodo va da dal 10-5 s (10 µs) a 10 s; le linee in questo caso riguardano la sola RX, sono sempre oblique ma in direzione opposta alla precedente. Scegliamo un condensatore da 100 nF (0,1 µF), a questo punto possiamo usare la nostra formula per ricavarci il valore di RX:
![]()
tale valore è compatibile con il grafico, infatti l’intersezione tra la linea verticale della capacità scelta con la riga virtuale collocata a metà tra 10-2 (10 ns) e 10-1 (100 ns) si localizza a circa metà strada tra la linea obliqua 1 MΩ e quella 100 kΩ. Naturalmente per la questione valori commerciali e precisione vale quanto spiegato nella sezione dedicata al circuito astabile. Finora al pin di TRIGGER abbiamo fornito un impulso negativo mediante un pulsante collegato a massa, ma questo circuito potrebbe tornare utile anche se si dispone di un altro circuito in grado di generare un impulso (Fig. 11).
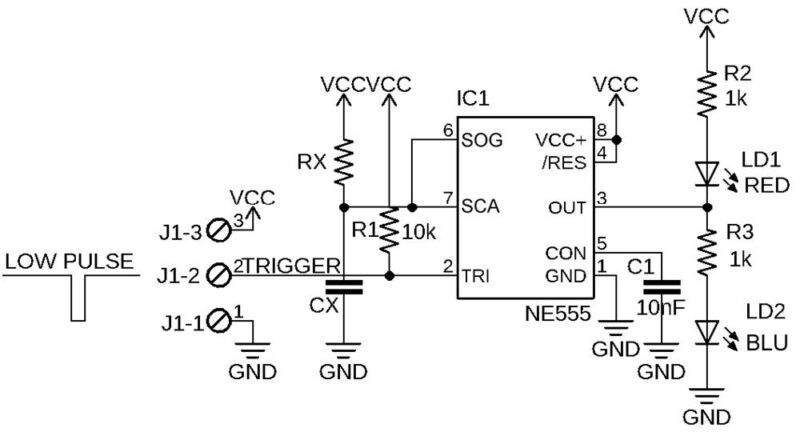
Fig. 11
Affinché l’impulso venga rilevato dal 555 è necessario che sia largo almeno 10 µs. Con l’aiuto di un Generatore di Funzioni abbiamo creato un segnale costituito da un impulso L di circa 60 ms ed un periodo totale di circa 500 ms tra un impulso ed il successivo. In questo caso l’eccitazione del circuito ha un andamento regolare (Fig. 12), ma se pensiamo per esempio ad un circuito che genera questo impulso negativo solo al verificarsi di una data condizione, solo in quel momento avverrà il cambio di stato dell’USCITA del 555. Una caratteristica importante del circuito monostabile è data dal fatto che, una volta che il TRIGGER riceve un impulso valido e porta l’USCITA allo stato alto H, tutti gli altri eventuali impulsi che arrivano al TRIGGER durante la carica del condensatore, e quindi della fase H, saranno ignorati; questa cosa garantisce che la durata dell’impulso sia sempre uguale.
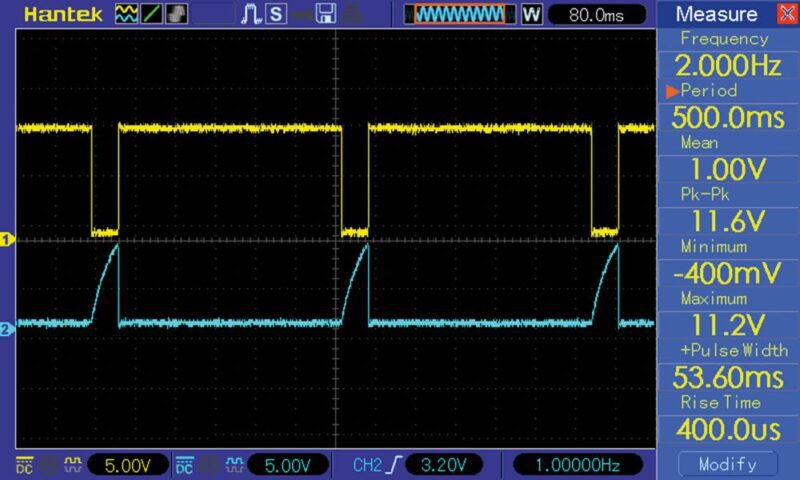
Fig. 12
Con la tecnica dell’impulso negativo applicato esternamente, se si ricorre ad un clock, cioè ad un segnale a frequenza costante, è possibile utilizzare un circuito monostabile come astabile, ed in tal caso si può superare la limitazione del Duty Cycle maggiore del 50%.
In questo esempio realizziamo un generatore di onda quadra con frequenza 1 Hz e D.C. al 50%. Prima di tutto va chiarita una questione importante, la formula per il circuito monostabile calcola la larghezza dell’impulso H, mentre un’onda quadra ha un ciclo composto anche dalla fase L; nel nostro calcolo dobbiamo tener conto di questa cosa, altrimenti non otterremo il risultato desiderato. Una frequenza da 1 Hz e D.C. al 50% deve essere costituita da una fase H ed una fase L di pari durata; poiché il periodo corrispondente alla frequenza di 1 Hz è di 1000 ms, va diviso equamente fra H e L.
Per ottenere un impulso tH di circa 500 ms ricorriamo ad un resistore da 1 MΩ per RX ed un condensatore da 470 nF per CX. Per ottenere la fase L identica alla fase H bisogna applicare al TRIGGER un clock con frequenza pari al 50% di quella impostata per il monostabile, quindi 500 mHz.
La Fig. 13 dimostra come il clock (onda quadra in basso) forzi la fase di carica di CX (segnale in alto) ad intervalli regolari, e che la fase di carica e quella in cui il condensatore è scarico sono identiche.
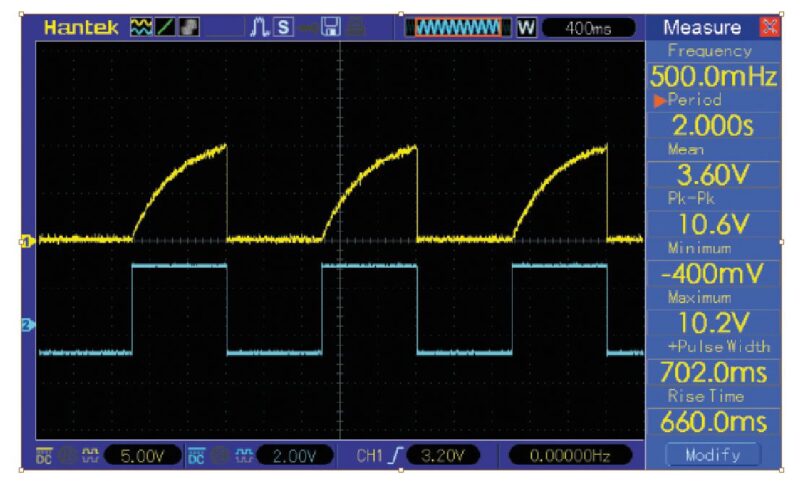
Fig. 13
Come per i circuiti astabili, anche in questo caso abbiamo predisposto un foglio Excel con le tre formule di calcolo utili per questa configurazione (Fig. 14).
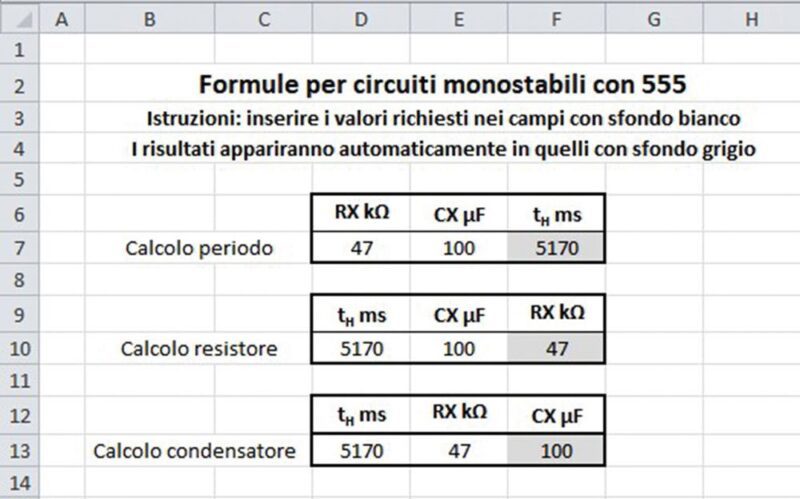
Fig. 14
Multivibratore BISTABILE con Timer 555
La Fig. 15 mostra la tipologia base del multivibratore bistabile, in cui i due componenti fondamentali sono gli switch S1 e S2; il C1 (10 nF) è il solito filtro antidisturbo, i resistori R1 e R2 hanno la funzione di pullup, mentre i resistori R3 e R4 ed i LED LD1 e LD2 servono per visualizzare il comportamento del circuito, come nelle situazioni precedenti.
Anche in questo caso l’ingresso SOGLIA è scollegato dal TRIGGER, ma questa volta il pin SCARICA resta inutilizzato, poiché il circuito non prevede l’uso di condensatori, infatti questa configurazione non prevede alcuna temporizzazione, ma solo due stati logici stabili.
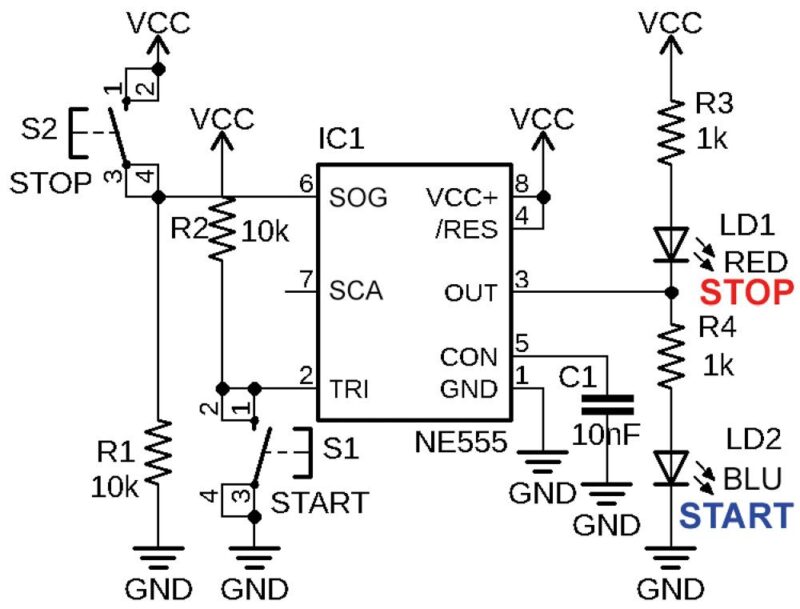
Fig. 15
Al momento dell’accensione il TRIGGER si trova ad un livello maggiore di 1/3 VCC, quindi l’USCITA si trova inizialmente al livello L (STOP), nel quale resta in modo stabile, in mancanza di eventi; la SOGLIA si trova ad un livello minore di 2/3 VCC, e questa combinazione, in base alla quarta riga della tabella della Fig. 3, non provoca commutazioni; a conferma di ciò il LED LD1 risulta costantemente acceso.
Se si preme il pulsante S2 (STOP) la SOGLIA viene portata ad un livello maggiore di 2/3 VCC, e ci si trova nella condizione prevista dalla riga 3 della tabella, quindi lo stato dell’USCITA non cambia.
Se invece si preme il pulsante S1 (START) il TRIGGER viene portato ad un livello minore di 1/3 VCC, e ci si trova nella condizione della riga 2 della tabella, quindi l’USCITA diventa alta (H), si spegne il LED LD1 e si accende LD2. Rilasciando S1 la combinazione degli ingressi ridiventa quella della riga 4, e quindi anche questo stato è stabile.
Questa è la ragione per la quale questo tipo di configurazione viene definita bistabile. Il multivibratore bistabile trova applicazione quando bisogna gestire un sistema in base al comportamento di due diversi elementi (sensori o interruttori, p.es.); in effetti è il tipico funzionamento del LATCH SET-RESET.
Conclusioni
Arrivati a questo punto finisce la nostra trattazione su questo semplice ma eccellente ed economico circuito integrato; ora che è chiaro il suo funzionamento nelle sue tre possibili configurazioni, si potrà essere in grado di realizzare, con molta facilità, innumerevoli applicativi.
Stiamo comunque preparando una serie di circuiti molto interessanti che vi presenteremo nei prossimi numeri della rivista, e che naturalmente non mancheremo di spiegare in modo da approfondire ancor più le conoscenze del Timer 555.