Open source e basato su un microcontrollore ATmega32U4, è dotato di driver per due motori CC a spazzole o uno stepper motor. Può ricevere comandi da USB, seriale o I²C bus.
Per chi fa robotica, una delle problematiche da risolvere è la gestione dei motori per la trazione, ovvero come alimentare correttamente i motori per far avanzare il proprio robot.
Se lavorate con Arduino, la prima e immediata soluzione è l’utilizzo di uno shield; in commercio se ne trovano diversi, dai più semplici che permettono il controllo separato di due piccoli motori in corrente continua, ai più evoluti che possono anche misurare la corrente assorbita.
Indipendentemente dal produttore, gli shield si basano tutti sull’utilizzo di un driver di potenza (di solito un L298) interfacciato direttamente con le uscite PWM di Arduino e contornato da pochi altri componenti.
Sicuramente l’uso di uno shield è una soluzione valida, ma è necessario utilizzare almeno quattro uscite di Arduino: di solito due per regolare la velocità e due per la direzione.
Se invece utilizzate un microcontrollore generico oppure un Atmel stand-alone o una board diversa da Arduino, le cose si complicano un pochino, perché in commercio è difficile reperire driver con un’interfaccia più flessibile ed il costo comincia a lievitare.
Se poi avete la necessità di comandare più di due motori, la cosa si complica parecchio, anche per chi utilizza una scheda Arduino, perché sorgono problematiche sia sul piano hardware che su quello della programmazione del dispositivo.
Per venire incontro alle esigenze di chi vuole gestire piccoli motori in corrente continua con logiche programmabili, abbiamo pensato di progettare un driver tutto nostro che permettesse di avere un’elevata flessibilità operativa e soprattutto fosse open source, al fine di permettere a chiunque di poterlo adattare alle proprie esigenze.
Il nome che gli abbiamo dato è significativo della filosofia progettuale: OpenMotorControl, che abbiamo abbreviato in OMC21, dove 21 indica il numero di canali (due in questo caso) e la corrente gestita per ciascun canale (1A).
Come vedremo, si tratta di un circuito stand-alone pilotabile da varie logiche, dotato di un’interfaccia di comunicazione che prevede diversi protocolli di comunicazione ed è adatta alle più svariate esigenze.
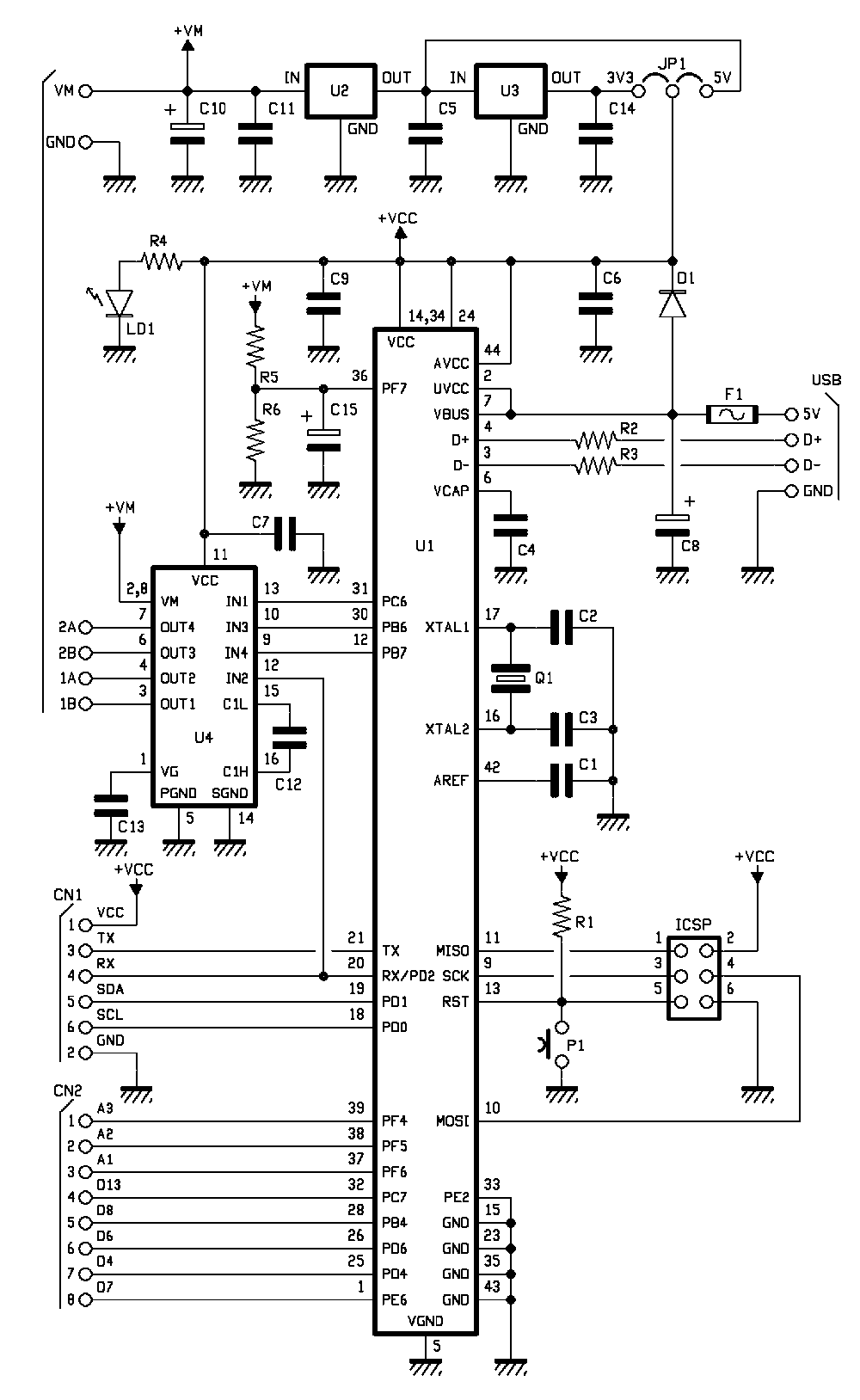
Schema elettrico di OpenMotorControl
Tipicamente, nel realizzare un controller per motori in corrente continua si ricorre al cosiddetto ponte ad H, ovvero un circuito formato da quattro transistor montati a ponte, in grado di comandare velocità e direzione del motore attraverso l’erogazione di impulsi PWM e l’inversione della polarità all’uscita.
Per la nostra applicazione, un semplice ed economico circuito integrato contenente un ponte ad H è più che sufficiente, anche perché, permette di contenere costi ed ingombri.
Il circuito integrato adottato è siglato LV8405 ed è un completo ponte ad H a MOSFET ad elevate prestazioni che implementa anche un controllo sulla tensione di alimentazione e dispone di protezioni sia in temperatura che in corrente.
Viene venduto nel package SMD SSOP16 e quindi non è direttamente utilizzabile in breadboard, ma è necessario sia previsto un apposito PCB.
Pur essendo piccolissimo, presenta caratteristiche di tutto rispetto:
• 2 canali con controllo forward/reverse;
• basso consumo;
• bassa resistenza serie dei MOSFET (0,75 ohm);
• protezioni integrate da bassa tensione e surriscaldamento;
• quattro modi di funzionamento (forward/reverse, brake, stop);
• corrente massima di uscita 1,4A;
• corrente di uscita (picco) di 2,5A.
La bassissima resistenza dei MOSFET usati per il controllo del motore (soli 0,75 ohm) permette un rendimento molto elevato e presenta una dissipazione di calore molto contenuta.
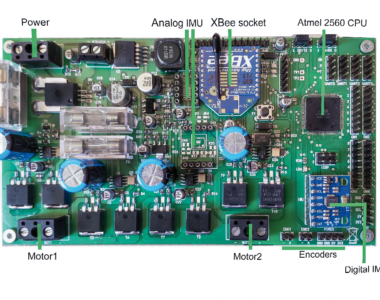
Per realizzare un controllo motori facile da interfacciare e programmare è però necessario abbinare questo IC ad un microcontrollore debitamente programmato: la scelta è caduta sull’ATmega32U4 prodotto dalla Atmel, lo stesso utilizzato sulla scheda Arduino Leonardo.
Nella scheda Leonardo, a differenza di Arduino Uno, che usa il microcontrollore ATmega328, viene usato l’ATmega32U4 perché implementa al suo interno anche tutto l’hardware per la comunicazione USB, eliminando la necessità di utilizzare esternamente un convertitore USB/seriale.
Le caratteristiche sono in generale migliori dell’ATmega328, essendo un componente di ultima generazione; inoltre il micro è perfettamente compatibile con l’ambiente di sviluppo (IDE) di Arduino.
Pochi altri componenti ed ecco disponibile un controllo motori piccolo, economico e dalle caratteristiche interessanti:
• configurazione a doppio ponte H per pilotare due motori in cc o uno stepper motor bipolare;
• tensione della sezione di potenza: 3 ÷ 15V;
• tensione di alimentazione della logica: 3 ÷ 5V;
• corrente di uscita: 1,4A continua (2,5A picco) per motore;
• interfacciamento USB, seriale, I²C-Bus;
• ingressi compatibili 3,3V e 5V;
• alimentazione selezionabile tra interna ed esterna a 3,3V o 5V.
Siccome volevamo un controller molto flessibile, abbiamo curato particolarmente la sezione di alimentazione; volevamo un driver compatibile con logiche a 3,3V e 5V che potesse sia essere alimentato dalla stessa tensione della logica di comando, sia alimentare una logica esterna, così da lavorare con gli stessi livelli di alimentazione.
Nello schema elettrico del circuito (lo trovate qui accanto…) potete vedere che sono stati previsti due stabilizzatori di tensione di tipo low-drop-out (a bassa caduta di tensione ingresso-uscita) utilizzati per ricavare le tensioni di alimentazione a 3,3V (se ne occupa U3) e 5V (se ne occupa U2); la selezione della necessaria tensione di alimentazione avviene unendo con una goccia di stagno le piazzole corrispondenti del jumper JP1.
Saldando la piazzola centrale con la 3V3 si imposta la tensione di alimentazione a 5V, mentre collegandola a 3V3 si fissa la tensione a 3,3 volt.
Come da specifiche dell’integrato ATmega32U4, il funzionamento a 3,3 volt è garantito solo con un quarzo da 8MHz, al quale va abbinato il corrispondente bootloader. La tensione scelta risulta anche disponibile sul connettore CN1 e può essere utilizzata per alimentare una logica esterna, come una scheda Arduino (si veda la Tabella 6).
L’alimentazione principale per tutto il circuito viene prelevata dalla linea di alimentazione dei motori VM.
Un’ulteriore possibilità prevede di non saldare alcuna piazzola del connettore CN3 in questo modo l’alimentazione VM verrà usata per alimentare i soli motori mentre l’alimentazione per l’ATmega32U4 dovrà essere applicata esternamente dalla logica di comando tramite il connettore CN1; in questo caso sarà necessario che la logica di comando venga alimentata separatamente.
Per quando riguarda il connettore di alimentazione, esso prevede sei contatti di cui due per l’alimentazione denominati VM e GND, due per il primo motore (1A e 1B) e altrettanti per il secondo motore (2A e 2B).
L’alimentazione VM dovrà ovviamente essere compatibile con la tensione di alimentazione dei motori e dovrà fornire sufficiente corrente per alimentare i motori. Il connettore ICSP è il connettore per la programmazione, spiegheremo più avanti come utilizzare questo connettore per caricare il bootloader all’interno dell’ATmega32U4.
Il CN1 è il connettore per l’alimentazione della logica e per la comunicazione seriale e I²C. Quanto al connettore micro USB, è utilizzato sia per impartire comandi al controller, sia per la programmazione del microcontrollore tramite l’IDE di Arduino.
Caricare il bootloader su OpenMotorControl
Se avete acquistato OMC21 da Futura Elettronica il bootloader è già precaricato. Se invece vi siete costruiti il progetto, seguite questa procedura per rendere OMC21 rilevabile come un Arduino Leonardo.
Per caricare il bootloader dovrete necessariamente procedere così: non collegate nulla sul connettore CN2 e lasciate dissaldato il connettore per la selezione dell’alimentazione, oppure lasciate impostata una tensione di 5V.
Se disponete di un apposito programmatore per dispositivi Atmel conoscete già la procedura; altrimenti munitevi di una scheda Arduino Uno, che userete come programmatore.
Il connettore ICSP del controller OMC21 dovrà essere cablato pin to pin con il connettore ICSP di Arduino utilizzato come programmatore, ovvero pin 1 con pin 1 e così via; fa eccezione il pin 5 (pin di reset) del connettore del controller, che deve essere connesso al pin10 di Arduino.
A questo punto collegate la scheda Arduino alla porta USB; il LED di alimentazione di OMC si accenderà ad indicare la sua corretta alimentazione.
Caricate su Arduino lo sketch Esempi-ArduinoISP, il quale abiliterà Arduino alla funzione di programmatore; ora aprite il menu Strumenti-Tipo di Arduino e modificate il target di programmazione in Arduino Leonardo; selezionate il programmatore Arduino as ISP e quindi avviate la programmazione del bootloader cliccando su Scrivi il bootloader. Attendete circa un minuto per il completamento delle operazioni.
L’integrato ATmega32U4 dispone di una seriale principale facente capo al modulo USB interno; a livello di programmazione, nulla cambia rispetto ad Arduino, se non per il fatto che non serve un convertitore USB/seriale esterno perchè già implementato all’interno. Grazie al bootloader, non appena OMC21 viene inserito nella USB esso verrà riconosciuto come periferica e creata una seriale virtuale etichettata come Arduino Leonardo alla quale viene assegnato un nome: nel caso di Fig. 1, COM21.
Fig. 1 L’OMC21 viene rilevato come periferica seriale Arduino Leonardo.
A questo punto il vostro OMC21 può essere gestito completamente via USB ed è possibile caricare, tramite l’IDE di Arduino lo sketch di gestione denominato OMC21.ino; descriviamo ora come funziona questo software di gestione, in particolare il controllo del ponte ad H. Iniziamo col dire che la gestione dei quattro interruttori statici rappresentati dai transistor può essere fatta in modo differente a seconda della funzione che si vuole ottenere.
Prendiamo a riferimento la Fig. 2 che rappresenta, in modo semplificato, i quattro interruttori del ponte ad H, che nel nostro driver sono implementati con dei MOSFET.
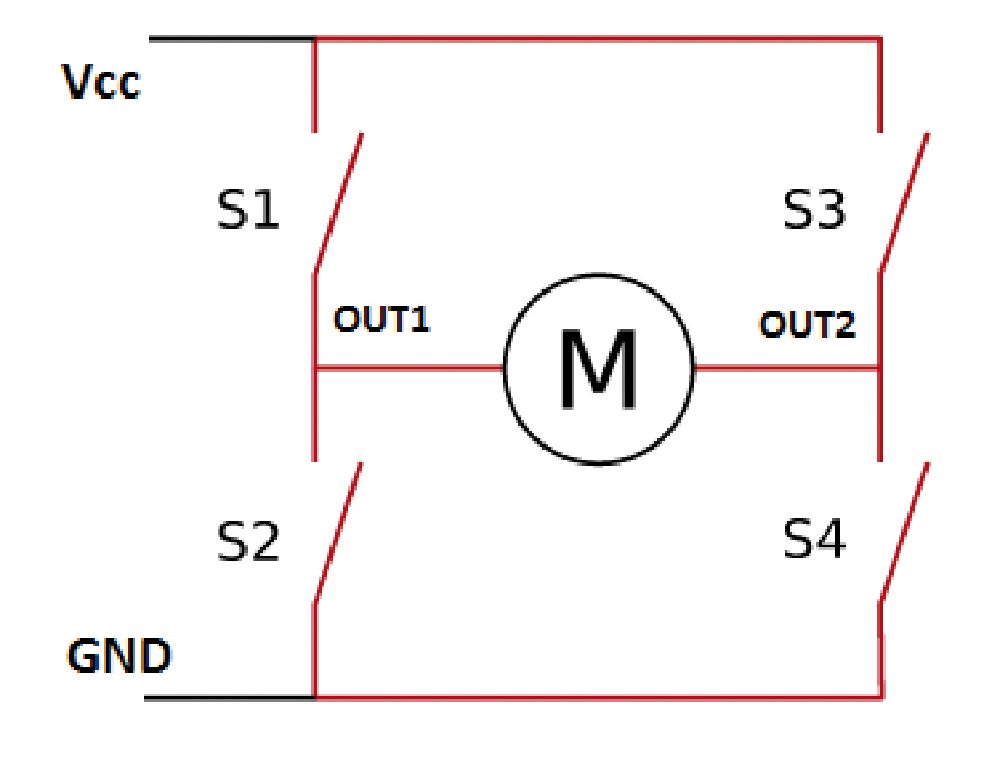
Fig. 2 Schematizzazione del ponte ad H.
Leggiamo attentamente il data-sheet del driver LV8405V-D e ricaviamo la tabella di verità (Tabella 1) relativa allo stato degli interruttori (S1-S4) e delle uscite (OUT1 e OUT2) per ogni possibile combinazione degli ingressi; la lettera L indica un livello logico basso e la lettera H un livello logico alto.
Analizzando la Tabella 1 possiamo capire più in dettaglio le diverse modalità di funzionamento a seconda di come pilotiamo i due ingressi IN1 e IN2. Nel primo caso (IN1=H e IN2=H) entrambe le uscite si trovano in alta impedenza; in questa situazione è come se il motore fosse scollegato dal driver e libero di ruotare.
Se invece ci poniamo nel quarto caso (IN1=L e IN2=L) è come se il motore si trovasse in cortocircuito; cosa cambia all’atto pratico tra i due casi? Se utilizziamo i motori per far avanzare un robot che sta avanzando a velocità sostenuta, nel primo caso, privando i motori dell’alimentazione, otterremo un arresto graduale del robot, che si fermerà in uno spazio dipendente dalla propria inerzia.
L’arresto deriverà dai vari attriti negli organi meccanici e da quelli tra il robot e la superficie su cui si muoverà.
Per comprendere cosa succede nella seconda ipotesi, occorre considerare che un motore in corrente continua è una macchina reversibile, ovvero se gli forniamo energia elettrica il suo motore ruota, ma se siamo noi a ruotarlo il motore fornirà energia elettrica, comportandosi, cioè, da generatore elettrico; in questo secondo caso, per il fenomeno della reazione d’indotto, lo sforzo richiesto per ruotare l’albero dipenderà da quanta corrente verrà prelevata dagli estremi degli avvolgimenti del motore.
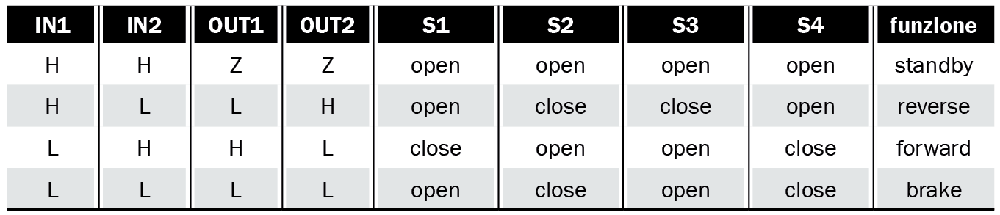
Tabella 1 Tabella di verità del driver LV8405.
Trasferendo questo concetto al nostro caso, diciamo che se quando il robot è in movimento togliamo tensione al motore, questo continuerà a girare per inerzia, ma se il ponte mette in cortocircuito i suoi terminali, la corrente che ne deriva nell’avvolgimento causa a sua volta un campo elettromagnetico tale da opporsi alla causa che l’ha generato; essendo tale causa la rotazione dell’albero, quest’ultimo verrà frenato fino a fermarsi, allorché mancando la corrente smetterà anche l’azione frenante.
Se provate entrambi i casi, anche solo facendo girare a mano una ruota, noterete in pratica l’effetto. In molti shield commerciali queste due funzioni non sono selezionabili, mentre nel nostro circuito abbiamo previsto la possibilità di selezionare (via software) in quale modalità utilizzare le uscite.
I rimanenti due casi descritti nella Tabella 1 sono invece più facili da comprendere: se poniamo l’ingresso IN1 a livello basso e comandiamo l’ingresso IN2 con un segnale PWM, abbiamo la possibilità di comandare il motore in direzione forward con una potenza direttamente proporzionale al valore del duty-cycle, il che permette di regolare la velocità di avanzamento del robot (quando il duty-cycle sarà zero fermeremo il robot con l’effetto freno precedentemente descritto).
Se invece applichiamo il segnale PWM all’ingresso IN2, ma poniamo l’ingresso IN1 a livello alto, quando il duty-cycle ha valore massimo siamo nel caso delle uscite ad alta impedenza ed il robot si fermerà senza alcun effetto frenante.
Invertendo IN1 con IN2 avremmo le stesse funzioni, ma con il motore che ruoterà in senso inverso. Vedete quindi come, giocando sugli ingressi, abbiamo la possibilità di scegliere direzione e velocità del motore e di attivare o meno l’effetto frenante.
Gli ingressi del driver IN1 e IN2 per il primo motore e IN3 e IN4 per il secondo motore, sono connessi a quattro uscite PWM dell’integrato ATmega32U4, facilmente gestibili con l’istruzione analogWrite disponibile nell’IDE di Arduino.
Per il collegamento dei motori e dell’alimentazione di potenza è stato previsto il connettore CN2, sul quale possono essere saldati sia uno strip maschio o femmina, sia un connettore con morsetti a vite.
Abbiamo previsto anche la possibilità di leggere la tensione di alimentazione VM utilizzando un semplice partitore di tensione; per rendere compatibile il livello della tensione di alimentazione dei motori con quella di lettura degli ingressi analogici di Arduino, la tensione viene ridotta di un fattore undici e quindi resa disponibile all’ingresso A0 di Arduino.
Conoscere la tensione permette, nel caso di alimentazione a batteria, di evitare la scarica completa, ovvero, in carica, di impedire la sovra-scarica (sempre dannosa).
Al connettore CN2 fanno capo ulteriori pin di Arduino, ovvero i rimanenti pin digitali non usati dal driver e tre pin analogici. In pratica è come se disponessimo di una scheda Arduino Leonardo con a bordo un driver per motori.
Piano di montaggio di OMC21
Elenco componenti
R1, R6: 10 kohm (0603) R2, R3: 22 ohm (0603) R4: 470 ohm (0603) R5: 100 kohm (0603) C1: 100 nF multistrato (0603) C2: 15 pF ceramico (0603) C3: 15 pF ceramico (0603) C4: 1 µF ceramico (0603) C5÷C7: 100 nF multistrato (0603) C8: 10 µF 10 VL elettrolitico (Ø 4mm) C9, C11: 100 nF multistrato (0603) C10: 10 µF 35 VL elettrolitico (Ø 4mm) C12: 10 nF multistrato (0603) C13, C14: 100 nF multistrato (0603) C15: 4,7 µF 10 VL elettrolitico (Ø 4mm) D1: GF1M F1: Fusibile 500mA auto ripristinante LD1: LED verde (0805) U1: ATMEGA32U4-AU (MF1173) U2: LD1117S50CTR U3: LD1117AS33TR U4: LV8405V-TLM-E P1: Pulsante SMD basso profilo Q1: Quarzo 16MHz Varie: - Connettore micro-USB - Strip maschio 3 vie (2 pz.) - Strip maschio 6 vie (1 pz.) - Strip maschio 8 vie (1 pz.) - morsetto 6 poli passo 2,54mm - Circuito stampato
Il firmware
Occupiamoci ora di descrivere il programma che sarà caricato sull’ATmega32U4.
Lo sketch dovrà occuparsi di gestire la comunicazione USB, quella seriale e quella I²C, interpretando i comandi letti e mettendoli in pratica comandando adeguatamente gli ingressi del driver.
Lo sketch prevede quindi una routine di ascolto sulle tre porte di comunicazione, in attesa di dati in arrivo; fortunatamente il piccolo ATmega32U4 dispone di due moduli UART ed una porta I²C hardware, perfette per il nostro progetto.
La seriale principale (Serial) fa capo al modulo USB e dal lato software si comporta esattamente come la seriale di Arduino Uno, perciò la ricezione di dati su questa porta può essere ottenuta con l’istruzione Serial.available() che riporta il numero di caratteri presenti sul buffer di lettura.
In questa modalità l’OMC21 è controllabile tramite un PC o una qualsiasi periferica che disponga di una USB host.
La dichiarazione di utilizzo di questa seriale avviene con la riga di codice Serial.begin(9600) dove 9600 è la velocità di comunicazione (modificabile a piacimento secondo le vostre necessità).
Abbiamo usato 9600 come impostazione predefinita perché è la velocità più usata; volendo ridurre i tempi di lettura dei comandi, potete incrementare questo valore sino al massimo di 115.200 bps.
Se sono presenti caratteri nel buffer del modulo UART, vengono letti tramite l’istruzione Serial.readBytes(inByte, maxinByte) che permette di leggere un numero prefissato di byte in un lasso di tempo prestabilito.
Il protocollo di comunicazione che abbiamo pensato di utilizzare prevede l’utilizzo di quattro byte, di cui il primo è solo il carattere ‘$’ , necessario per riconoscere l’inizio della sequenza; questo, assieme al numero di caratteri inviati, rappresenta il controllo di correttezza nella lettura del comando.
Terminata la lettura dei quattro byte, si verifica se ve ne siano altri; in ogni caso il buffer viene svuotato.
Può capitare che inviando i comandi si aggiungano inavvertitamente dei caratteri non necessari, come ad esempio un fine riga o un ritorno a capo; nella nostra applicazione questi vengono ignorati e cancellati dal buffer.
I rimanenti tre byte dopo il carattere ‘$’ rappresentano i comandi per il controller: il secondo byte contiene informazioni sulla modalità di funzionamento (brake o standby) e sulla direzione di marcia dei motori, mentre i byte tre e quattro contengono l’informazione della velocità, rispettivamente, per il motore 1 e 2. In questo modo, inviando una sequenza di quattro byte si comandano contemporaneamente entrambi i motori (Tabella 2).

Tabella 2 Sequenza di byte per il comando del controller.
Il byte2 contiene informazioni sia sulla modalità di funzionamento che sulla direzione dei motori (Tabella 3).
Il quinto bit del byte2, se posto a uno consente di richiedere la lettura della tensione di alimentazione; è l’unico caso in cui è necessaria la comunicazione seriale bidirezionale, altrimenti la sola linea di invio dati al controller è sufficiente.
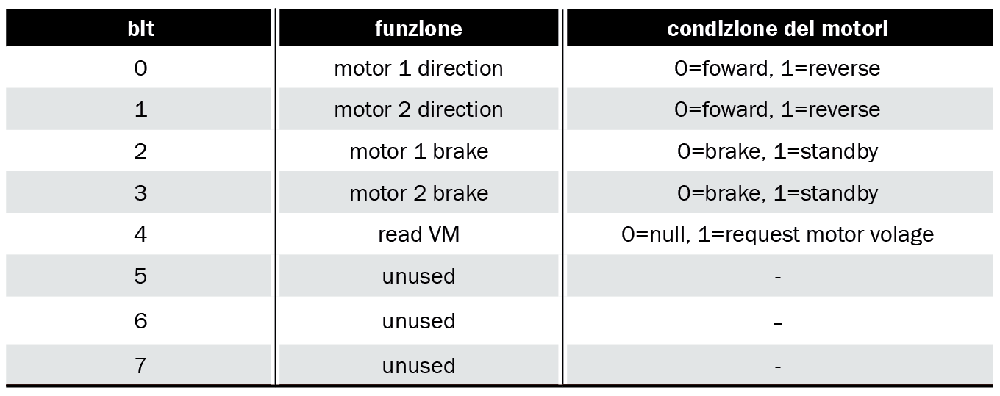
Tabella 3 Funzioni relative al byte2 della sequenza di comando.
Nel Listato 1 trovate le righe di codice dello sketch che svolgono le funzioni descritte.
Se volete comandare il controller tramite la seriale di un microcontrollore, dovete utilizzare la seconda porta seriale (Serial1) del microcontrollore ATmega32U4 i cui pin TX e RX sono disponibili nel connettore CN1.
La connessione prevede che la linea TX del microcontrollore sia connessa alla linea RX di OMC21 e se richiesta la lettura della tensione di alimentazione, anche la linea RX del microcontrollore connessa alla linea TX di OMC21.
La riga di codice che abilita questa seriale è Serial1.begin(9600); anche in questo caso la velocità di trasmissione può essere modificata sino un massimo di 115.200 bps.
Per quanto riguarda la gestione del software, è simile a quella della comunicazione seriale principale. Inoltre, la porta di comunicazione I²C viene attivata tramite l’istruzione Wire.onReceive(I2CreceiveEvent), dove I2CreceiveEvent è la procedura richiamata dall’interrupt alla ricezione del primo byte. Per maggiori dettagli su come vengono elaborati i dati ricevuti, si prega di consultare il Listato 2. riferitevi al Listato 2.
Ad ogni arrivo di dati su questa porta viene richiamata la procedura che si preoccupa di verificare se la sequenza è compatibile con lo standard OMC21 e quindi ne estrapola i valori. Lo sketch per OMC21 è quindi predisposto per monitorare continuamente l’invio dei byte di comando su tutte e tre le porte di comunicazione: USB, seriale e I²C.
Non ha importanza su quale porta arriveranno i dati, al limite potrebbero arrivare anche in contemporanea, anche se sarebbe abbastanza inutile farlo, il vantaggio è comunque quello di caricare un unico sketch, evitando di impazzire con la programmazione.
Il nostro controller OMC21 una volta programmato è pronto ad azionare i motori in base ai comandi ricevuti, vediamo con degli esempi come poterlo fare sfruttando le diverse porte di comunicazione.
Listato 1
if (Serial.available() & gt; 0) {
char inByte[maxinByte];
int numByte = Serial.readBytes(inByte, maxinByte);
// reads until maxinByte are reads or if TimeOut is occurred
byte extraByte; // clear the buffer if extra bytes is arrived
while (Serial.available()) extraByte = Serial.read();
// if data starting with ‘$’ and lenght is correct...
if (inByte[0] ==’$’ & amp; & numByte == maxinByte) {
dirM1 = inByte[1];
dirM1 = dirM1 & amp;
0x01;
dirM2 = inByte[1];
dirM2 = (dirM2 & amp; 0x02) & gt;
>
1;
modeM1 = inByte[1];
modeM1 = (modeM1 & amp; 0x04) & gt;
>
2;
modeM2 = inByte[1];
modeM2 = (modeM2 & amp; 0x08) & gt;
>
3;
speedM1 = inByte[2];
speedM2 = inByte[3];
setMotor();
byte readVM = inByte[1];
readVM = (readVM & amp; 0x10) & gt;
>
4;
if (readVM == 1) {
int VM = analogRead(VM_pin) * 36;
VM = VM & gt;
>
6;
Serial.println(VM); // VM*10 [volt] (0-255)
}
}
}
Listato 2
void I2CreceiveEvent(int byteIn) {
while (Wire.available() & gt; 0) // loop until available byte on wire
{
char acknowledge = Wire.read();
if (acknowledge ==’$’) {
char mode = Wire.read(); // read mode byte
speedM1 = Wire.read(); // read speed byte
speedM2 = Wire.read(); // read speed byte
dirM1 = mode;
dirM1 = dirM1 & amp;
0x01;
dirM2 = mode;
dirM2 = (dirM2 & amp; 0x02) & gt;
>
1;
modeM1 = mode;
modeM1 = (modeM1 & amp; 0x04) & gt;
>
2;
modeM2 = mode;
modeM2 = (modeM2 & amp; 0x08) & gt;
>
3;
setMotor();
}
}
}
Gestione tramite USB
Appena programmato, l’OMC21 è ancora connesso alla USB e viene subito voglia di testarlo senza ulteriori cablaggi, utilizzando il PC per l’invio dei comandi.
A titolo di esempio vediamo come costruire i tre byte dati per il controllo dei motori nel caso volessimo il motore 1 con direzione forward con potenza del 50% e funzione frenatura attivata ed il motore 2 con direzione reverse con potenza del 25% senza frenatura (standby).
Essendo la velocità espressa come valore numerico compreso da 0 (0% della potenza) a 255 (100% della potenza), ai due valori 50% e 25% corrispondono rispettivamente i valori decimali 128 e 64.
Il byte2 dovrà essere costruito bit per bit come nella Tabella 4.
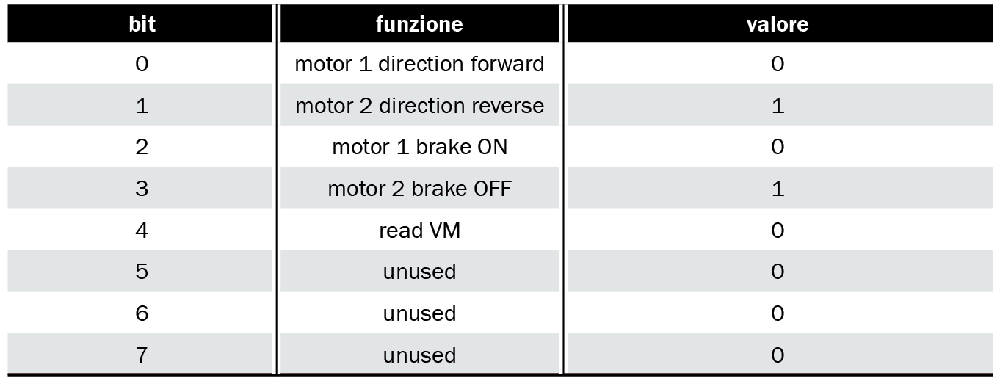
Tabella 4 Costruzione del byte2 per l’esempio indicato.
I tre byte di comando saranno quindi quelli riportati in Tabella 5.

Tabella 5 Sequenza di byte per l’esempio indicato.
Se il nostro controller è connesso alla seriale difficilmente potremmo controllarlo utilizzando la funzione SerialMonitor di Arduino, per il semplice motivo che i primi 31 caratteri del codice ASCII non sono stampabili, in quanto usati come comandi relativamente alla comunicazione con le stampanti.
Se vogliamo inviare i quattro byte così costruiti è necessario utilizzare un monitor seriale che permetta di gestire anche i caratteri non stampabili; nel nostro caso abbiamo usato un software gratuito, distribuito in versione portable di nome SSCOM (Fig. 3), ma tanti altri sono disponibili in rete.
Nell’esempio sono stati inviati (cerchio rosso) i byte 0x24 0x10 0x8F 0x00 corrispondenti a motore 1 fermo e motore 2 forward al 56% e richiesta tensione di alimentazione VM.
Evidenziati con un cerchio blu, i dati di risposta relativi ad una tensione di alimentazione di circa 6,8 volt.
Se invece volete crearvi un software di gestione tutto vostro, vi consigliamo di utilizzare Processing, che permette con semplicità di utilizzare una comunicazione seriale via USB, un esempio di sketch è riportato nel Listato 3.
Listato 3
// OpenMotorControl21
// Example to use Processing for control OMC21 USB
import processing.serial.*;
Serial myPort; // Create object from Serial class
void setup() {
size(200, 200);
background(0);
String portName = Serial.list()[0]; //change the 0 to a 1 or 2 etc.
println(“portName: “, portName);
myPort = new Serial(this, portName, 9600);
}
void draw() {}
void mouseClicked() // if click on background
{
int dirM1 = 0; // set direction for Motor1 0=forward 1=reverse
int dirM2 = 0; // set direction for Motor2 0=forward 1=reverse
int modeM1 = 0; // set mode for Motor1 0=brake 1=standby
int modeM2 = 0; // set mode for Motor2 0=brake 1=standby
int mode = (modeM2 & lt; & lt; 3) + (modeM1 & lt; & lt; 2) + (dirM2 & lt; & lt; 1) + dirM1;
char modedir = char(mode); // convert integer to char
char speedM1 = 128; // set speed for Motor1 at 50%
char speedM2 = 128; // set speed for Motor2 at 50%
myPort.write(‘$’); // write start char
myPort.write(modedir); // write mode-dir byte
myPort.write(speedM1);
myPort.write(speedM2);
}
In questo esempio, semplicemente viene creato un oggetto della classe serial, quindi all’avvio dello sketch viene aperta la porta e non appena viene cliccato su un qualsiasi punto vengono costruiti ed inviati i quattro byte necessari al comando dell’OMC21.
Non avendo previsto un menu a tendina per la scelta della COM, la porta viene specificata con la riga di codice portName = Serial.list()[0] in cui è necessario indicare l’indice relativo all’elenco del COM installate nel PC.
Se, come spesso accade, non disponete di COM hardware ed al PC è connesso solo Arduino, nella lista trovate una sola COM il cui indice è zero.
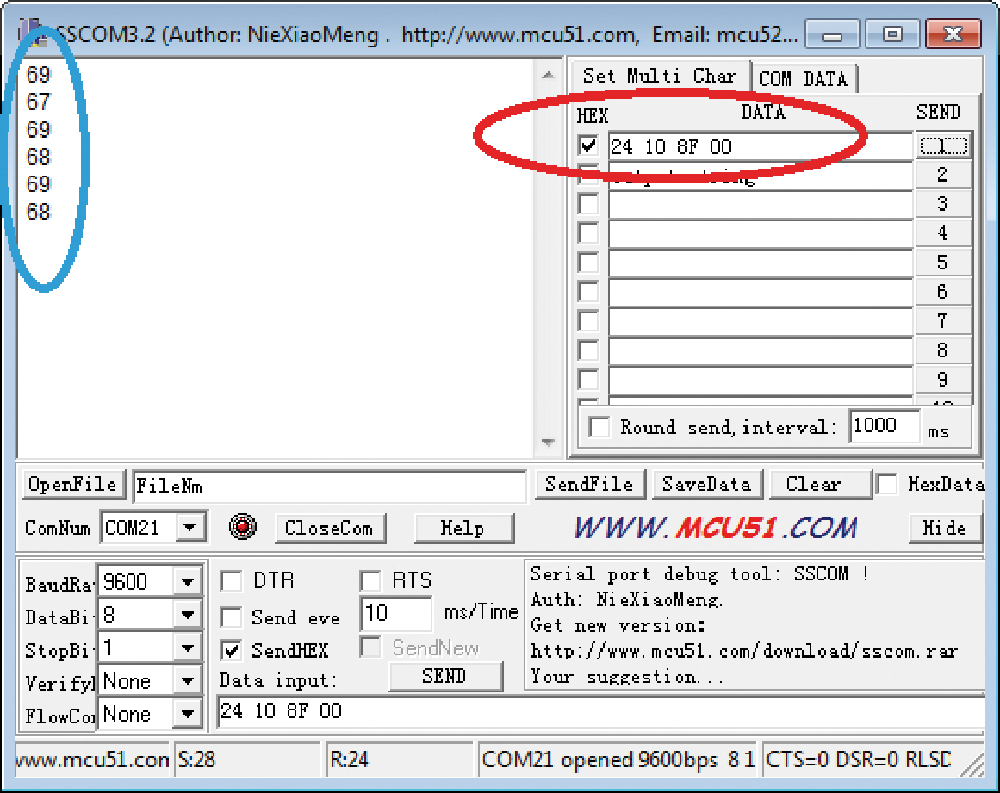
Fig. 3 Monitor Seriale SSCOM per inviare i comandi ad OMC21.
Gestione via Seriale
Se vogliamo comandare l’OMC21 tramite una scheda Arduino, conviene utilizzare una seriale software, utilizzando una sola linea digitale da connettere alla linea RX del connettore CN1; in questo modo la seriale hardware rimarrà libera di comunicare con il PC.
Lo sketch di esempio è riportato nel Listato 4, dove viene mostrato come sia possibile costruire il byte di controllo (byte2) partendo dalle impostazioni dei singoli bit di direzione e frenatura. Sarà la riga di codice int mode = (modeM2<<3) + (modeM1<<2) + (dirM2<<1) + dirM1 a ricostruire il byte completo traslando e sommando i singoli bit. Utilizzeremo successivamente quattro comandi Serial.write per inviare i singoli byte contenenti il carattere di inizio e i tre byte di dati.
Listato 4
// OpenMotorControl21
// Example to use Arduino for control OMC21 Softserial Serial
#include <SoftwareSerial.h>
SoftwareSerial OMCSerial(2, 3); // RX, TX
void setup() {
Serial.begin(9600); //use Hardware Serial to communicate with PC
OMCSerial.begin(9600); //use software serial to communicate with OMC21
}
void loop() {
byte dirM1 = 0; // set direction for Motor1 0=forward 1=reverse
byte dirM2 = 0; // set direction for Motor2 0=forward 1=reverse
byte modeM1 = 0; // set mode for Motor1 0=brake 1=standby
byte modeM2 = 0; // set mode for Motor2 0=brake 1=standby
byte mode = (modeM2 & lt; & lt; 3) + (modeM1 & lt; & lt; 2) + (dirM2 & lt; & lt; 1) + dirM1;
mode = mode + 16; //if request Motor voltage
char speedM1 = 128; // set speed for Motor1 at 50%
char speedM2 = 128; // set speed for Motor2 at 50%
OMCSerial.write(‘$’);
OMCSerial.write(mode);
OMCSerial.write(speedM1);
OMCSerial.write(speedM2);
delay(1000);
}
Gestione tramite I²C
Se volete controllare l’OMC21 tramite la porta TWI di Arduino, non dovete far altro che connettere le due linee SDA e SCL di entrambe le porte tra loro e collegare i GND di entrambe le schede.
Non sono necessarie le resistenze di pull-UP per il semplice motivo che sono già presenti internamente al microcontrollore sia in Arduino Uno che sull’ATmega32U4 ed abilitate in automatico non appena si richiama la funzione Wire.begin().
Lo sketch da caricare in Arduino Uno per comandare l’OMC21 è contenuto nel Listato 5, che si presenta molto simile ai già descritti precedenti listati. C’è però un’importante differenza con il modo di comunicare tramite seriale che riguarda il sistema di indirizzamento delle periferiche.
Mentre in una comunicazione seriale lo scambio di dati avviene punto a punto, ovvero solo due periferiche dialogano tra loro, nel Bus I²C possono coesistere sino a 127 periferiche di tipo Slave, tutte in comunicazione con l’unico master.
Il master in questo caso è Arduino Uno (o la logica di comando) mentre gli slave sono le schede OMC21; il vantaggio evidente è quello di poter utilizzare più controller e quindi più motori, tutti gestiti da un’unica scheda Arduino utilizzando una sola porta TWI.
Ricordiamo che in Arduino la porta TWI utilizza a tutti gli effetti il protocollo I²C, che però è proprietario della Philips (che lo ha inventato).
Nel Listato 5 è infatti presente la riga di codice const int OMC21address=4 che ha lo scopo di specificare verso quale slave avviene la comunicazione; ovviamente sul BUS TWI potranno coesistere anche altri slave non necessariamente controller motori OMC21. Nello sketch OMC21.ino è stato specificato come indirizzo predefinito di periferica il valore 4, ma questo può essere modificato a piacimento se intendete usare sul bus una periferica che ha già questo indirizzo.
Se usate più controller OMC21 è necessario che ciascuno abbia un indirizzo univoco; dovrete quindi caricare su ciascun controller uno sketch in cui avrete specificato un indirizzo differente. Nella stesura del programma di controllo dovrete poi tenere conto dei vari indirizzi assegnati, per assicurare il corretto transito dei dati.
Listato 5
// OpenMotorControl21
// Example to use Arduino for control OMC21 I2C
#include <Wire.h>
const int OMC21address = 4; //address of OMC21
void setup() {
Wire.begin(); // join i2c bus (address optional for master)
}
void loop() {
byte dirM1 = 0; // set direction for Motor1 0=forward 1=reverse
byte dirM2 = 0; // set direction for Motor2 0=forward 1=reverse
byte modeM1 = 0; // set mode for Motor1 0=brake 1=standby
byte modeM2 = 0; // set mode for Motor2 0=brake 1=standby
byte mode = (modeM2 & lt; & lt; 3) + (modeM1 & lt; & lt; 2) + (dirM2 & lt; & lt; 1) + dirM1;
char speedM1 = 128; // set speed for Motor1 at 50%
char speedM2 = 128; // set speed for Motor2 at 50%
Wire.beginTransmission(OMC21address); // transmit to OMC21
Wire.write(‘$’);
Wire.write(mode);
Wire.write(speedM1);
Wire.write(speedM2);
Wire.endTransmission(); // stop transmitting
delay(1000);
}
Utilizzo del controller
Quanto ai collegamenti e all’utilizzo pratico, sono possibili numerose combinazioni per l’alimentazione della logica di controllo e della sezione di potenza dell’integrato driver LV8405V-D; la Fig. 4 mostra il collegamento generale dei due motori in cc (per lo stepper-motor bipolare ogni avvolgimento va al posto di un motore) e dell’alimentazione della scheda.
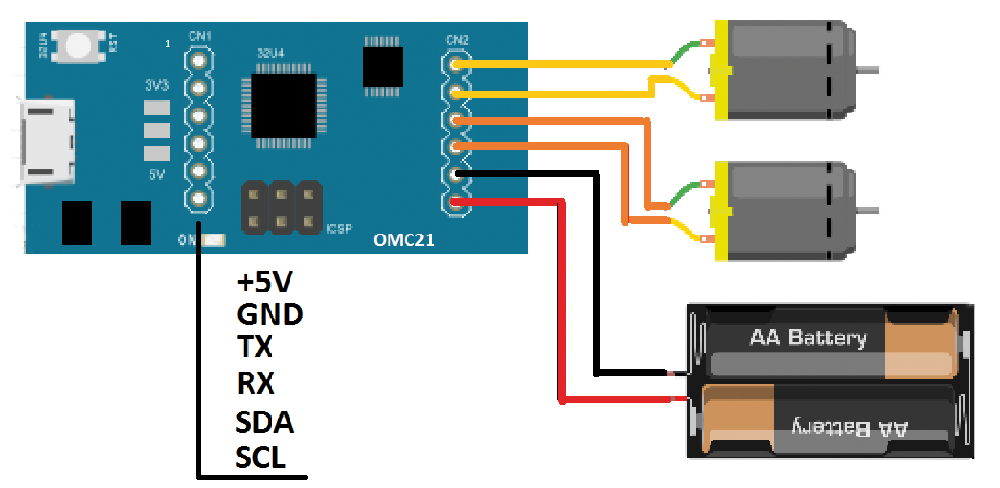
Fig. 4 Collegamento di motori e alimentazione al controller OMC21.
Invece, nella Fig. 5 viene illustrato come impostare il ponticello 3V3/5V (in questo caso va lasciato completamente aperto) di selezione dell’alimentazione del microcontrollore e della logica del driver LV8405V-D affinché venga prelevata direttamente dalla connessione USB; nella stessa figura i motori vengono alimentati da VM.
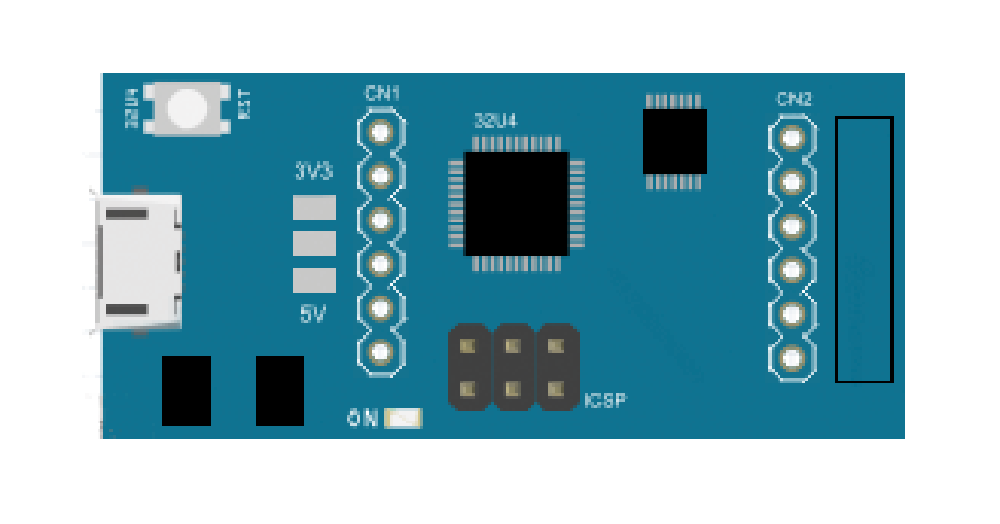
Fig. 5 Motori alimentati da VM e ATmega32U4 alimentato esternamente dalla logica di controllo.
La Fig. 6 mostra come impostare il ponticello se si desidera alimentare il circuito di potenza con VM e il microcontrollore e la logica del driver con i 3,3 volt ricavati dalla stessa VM tramite il regolatore U3 (il ponticello va realizzato chiudendolo con una goccia di stagno).
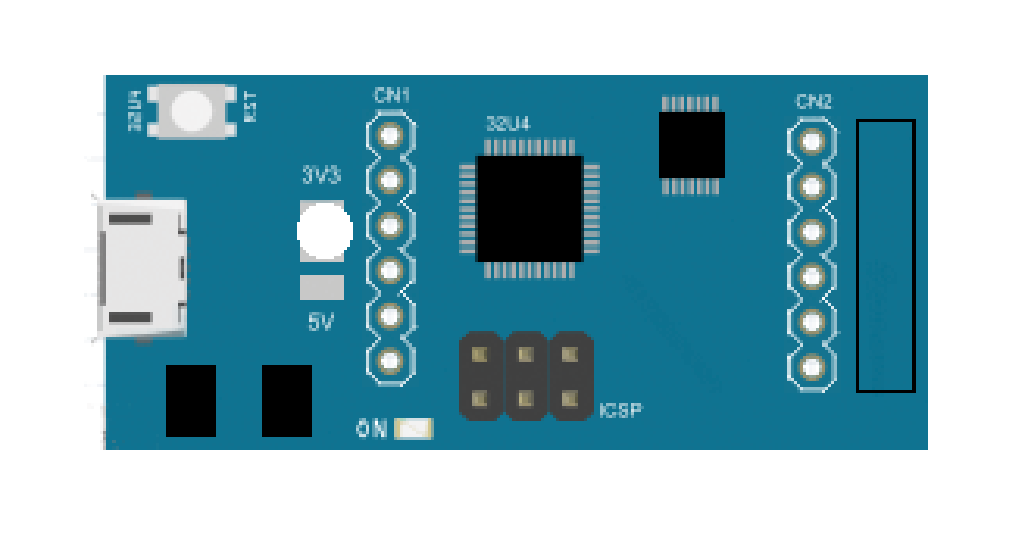
Fig. 6 Motori alimentati da VM e ATmega32U4 alimentato a 3,3V da VM.
Nella Fig. 7 è invece proposta l’impostazione del ponticello ammettendo di alimentare il microcontrollore e la logica del driver con i 5 volt che il regolatore U2 ricava da VM (tensione d’ingresso del circuito e di potenza).
E veniamo alle connessioni con Arduino Uno per il controllo seriale: le Fig. 8 e Fig. 9 riguardano rispettivamente la connessione via seriale TTL e quella tramite I²C-Bus.
Aggiungiamo ora alcune raccomandazioni per il corretto utilizzo di questo controller, tenendo conto di tutte le problematiche che si possano incontrare all’atto pratico nell’utilizzo dei motori a spazzole.
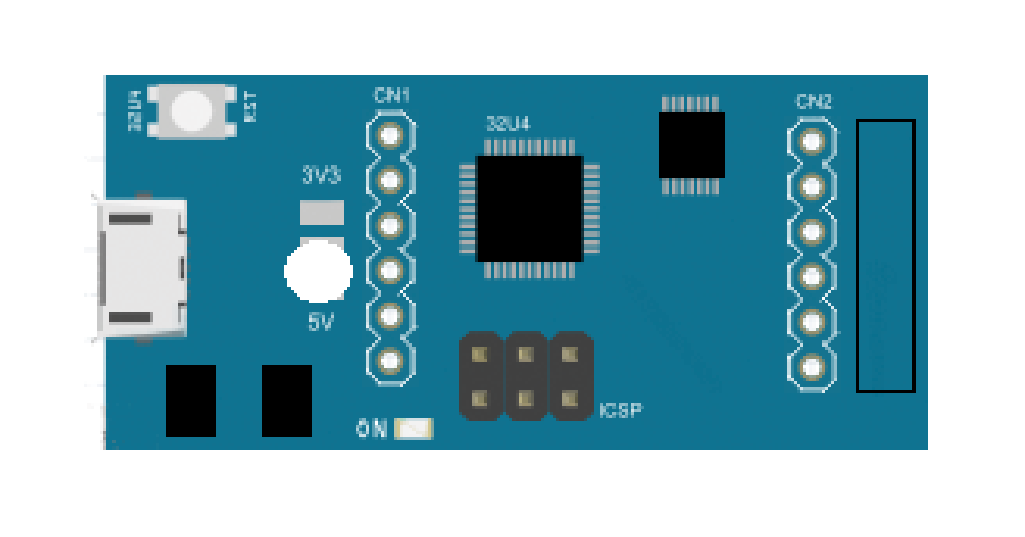
Fig. 7 Motori alimentati da VM e ATmega32U4 alimentato a 5V da VM.
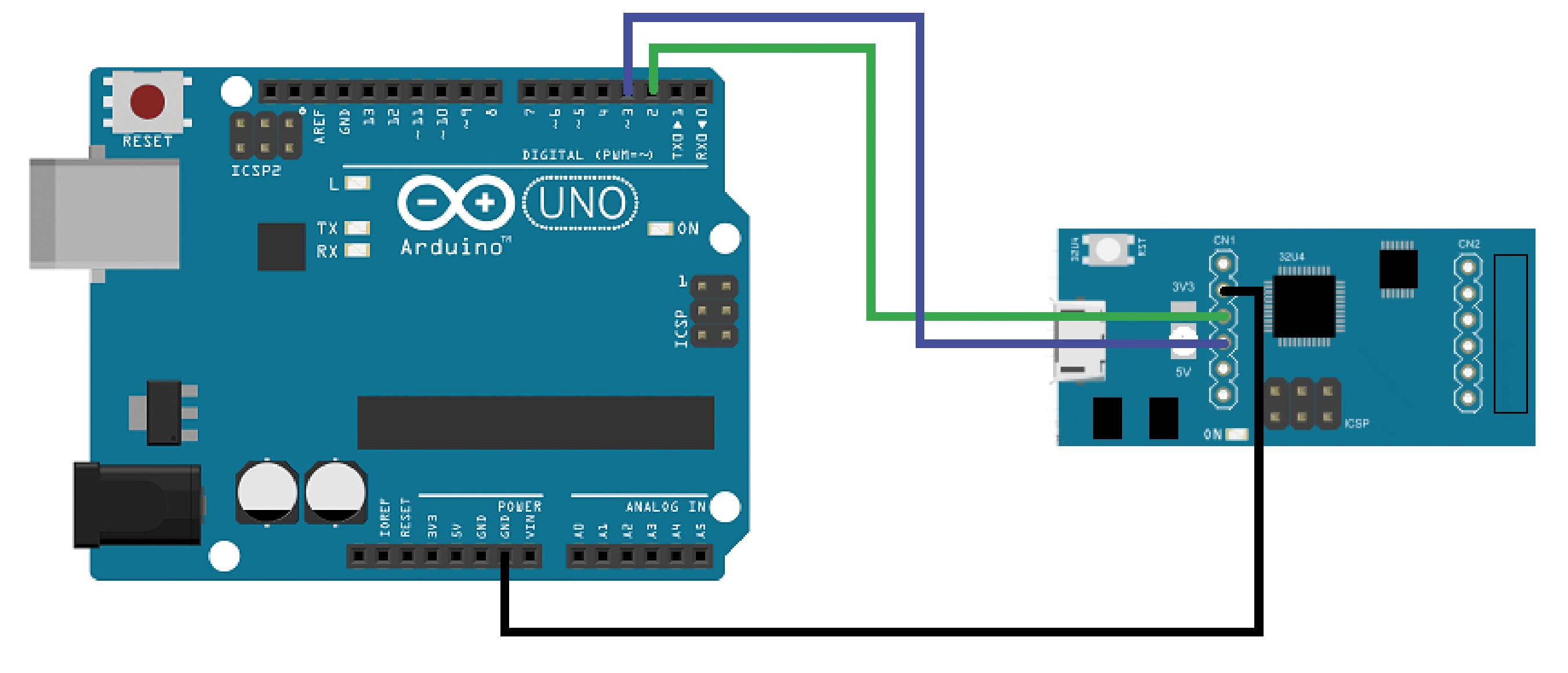
Fig. 8 OMC21 e logica di comando alimentati entrambi da VM e connessi in seriale ad Arduino Uno.
È buona norma prima di collegare un motore verificare se la massima corrente assorbita (di solito chiamata corrente di stallo) non eccede il valore massimo consentito.
Un’altra buona norma è di saldare direttamente sui contatti del motore tre condensatori ceramici del valore compreso tra 10 nF e 100 nF, con lo scopo di sopprimere i disturbi derivati dallo strisciamento delle spazzole sul collettore. I condensatori vanno saldati tra i due terminali e la carcassa ed eventualmente anche uno tra i due terminali di alimentazione (vedere Fig. 10).
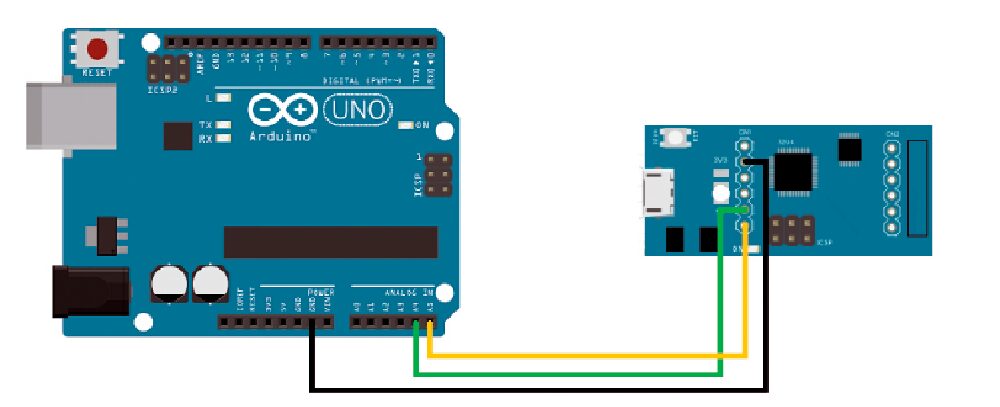
Fig. 9 OMC21 e logica di comando alimentati entrambi da VM e connessi tramite I2C ad Arduino Uno.
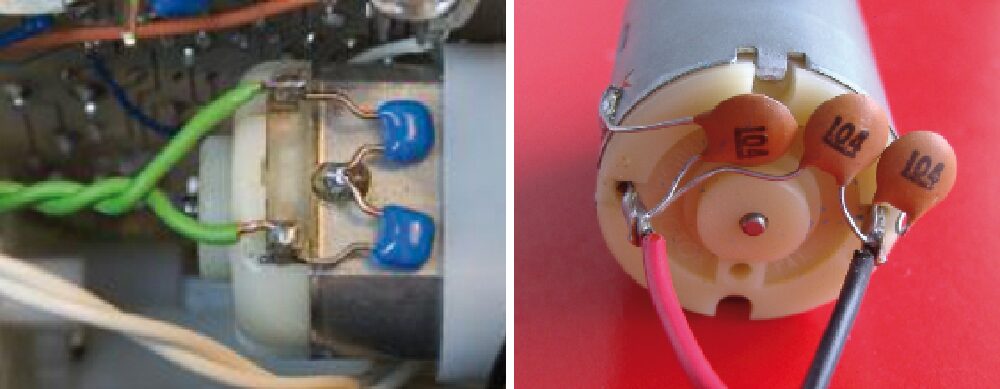
Fig. 10 Utilizzo dei condensatori come soppressori dei disturbi su un motore a spazzole.
Per concludere l’articolo, riportiamo anche un esempio pratico di utilizzo del nostro controller utilizzandolo in sostituzione della circuiteria elettronica guasta in una piccola automobilina RC. In questo esempio utilizziamo l’OMC21 per leggere i segnali provenienti da un ricevitore RC, di quelli usati in ambito modellistico, e comandare il motore dell’automobilina.
La ricevente è alimentata dallo stesso OMC grazie allo stabilizzatore di tensione interno impostato sui 5V. Il servo per lo sterzo è controllato direttamente dalla ricevente RC. L’alimentazione giunge da una piccola batteria LiPo connessa direttamente ad OMC21.
Il programma da inserire sul controller si chiama esc_rc_car2.ino e prevede anche una funzione di diagnostica grazie alla quale su serial monitor è possibile visualizzare i dati ricevuti dalla ricevente RC (Fig. 11).
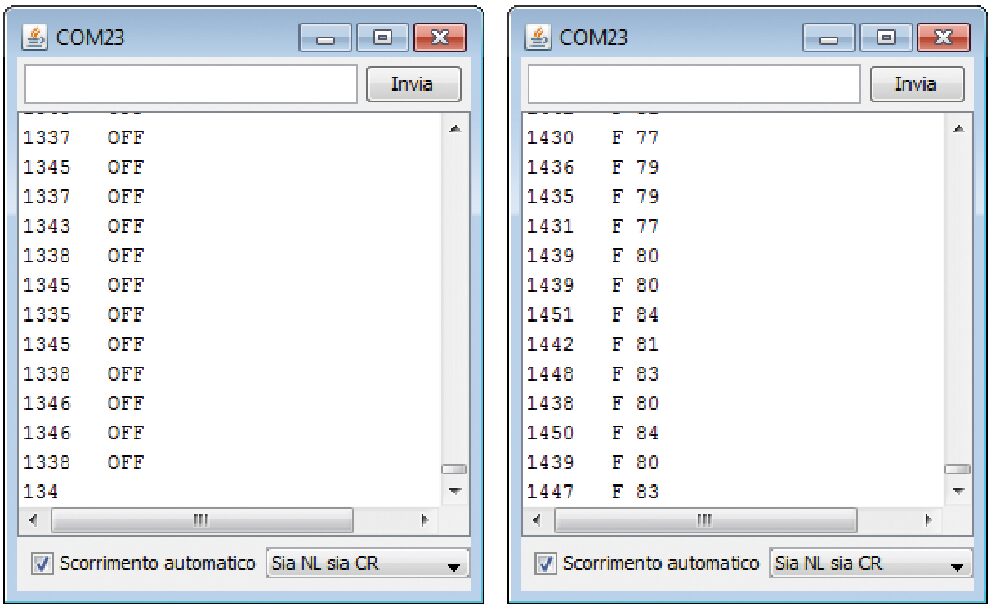
Fig. 11 Dati ricevuti dalla ricevente RC.
Il programma è molto semplice e si basa sulla lettura della durata dell’impulso ricevuto dalla ricevente RC grazie alla funzione pulseIn di Arduino; da questa lettura è poi sufficiente ricavare il giusto valore del duty-cycle per il comando dei motori. Per il resto sono state usate le funzioni già precedentemente descritte, con in aggiunta la lettura della tensione della batteria, impostando lo spegnimento motore (cut-off), non appena questa scenda al di sotto dei 6V, al fine di salvaguardare la batteria di alimentazione.