Con il driver per servomotori Octopus facciamo suonare una pianola giocattolo che riprodurrà motivi musicali nati con le suonerie Nokia.
Da parecchi anni le tastiere elettroniche, in special modo i sintetizzatori musicali, hanno la possibilità di suonare “da soli” brani, opportunamente pilotati tramite l’interfaccia MIDI o riproducendo file in formato standard caricati da supporti esterni di memorizzazione di massa.
Ma quello che ci siamo proposti di fare è far suonare motivi a nostra scelta a strumenti musicali più abbordabili, come piccole tastiere musicali e pianole giocattolo acquistabili nei centri commerciali per poche decine di euro, che per evidenti ragioni non dispongono di interfacce dati o slot per supporti di memorizzazione di massa e che quindi non possono essere pilotate elettronicamente. In questi casi l’unica soluzione è farle suonare in maniera tradizionale, agendo sui tasti con qualcosa che trasformi le note dei brani musicali in comandi meccanici. Insomma, un’interfaccia da elettronica a meccanica.
Questo lo abbiamo fatto e ha dato origine al progetto descritto in queste pagine, ossia un gadget che abbiamo sviluppato affinché possa essere utilizzato in varie occasioni, come ad esempio da demo in una vetrina o nel reparto giocattoli di un negozio, come pure da intrattenimento per grandi e piccoli in eventi e manifestazioni, per esempio, di robotica applicata.
Il progetto è nato dal desiderio di poter riprodurre con una tastiera musicale low cost (una tastiera giocattolo) delle musiche standard, però suonandole premendo effettivamente i tasti, pur senza metterci un dito. Abbiamo quindi pensato a una soluzione automatizzata che consiste in un piccolo robot che suona per noi i tasti della pianola.
Le musiche che abbiamo scelto non sono file audio qualsiasi ma, per praticità, abbiamo pensato ai ring tone (vale a dire le suonerie) sviluppati dalla Nokia e definiti RTTTL (acronimo di Ring Tone Text Trasfer Language), “suonati” dai cellulari del costruttore.
La nostra piattaforma robotica, che va applicata alla pianola adattandosi a forma e distanza dei tasti di quest’ultima, è composta da un “cervello” basato sulla ormai popolare scheda Fishino Uno (ma si può benissimo utilizzare un Arduino UNO) e da un sistema di attuazione realizzato col driver Octopus, già presentato in questo post.
Il tutto è stato “carrozzato” in stile fondale marino, con il risultato visibile nella Fig. 1.

Fig. 1 il sistema di carrozzato con tre piovre è applicato alla pianola
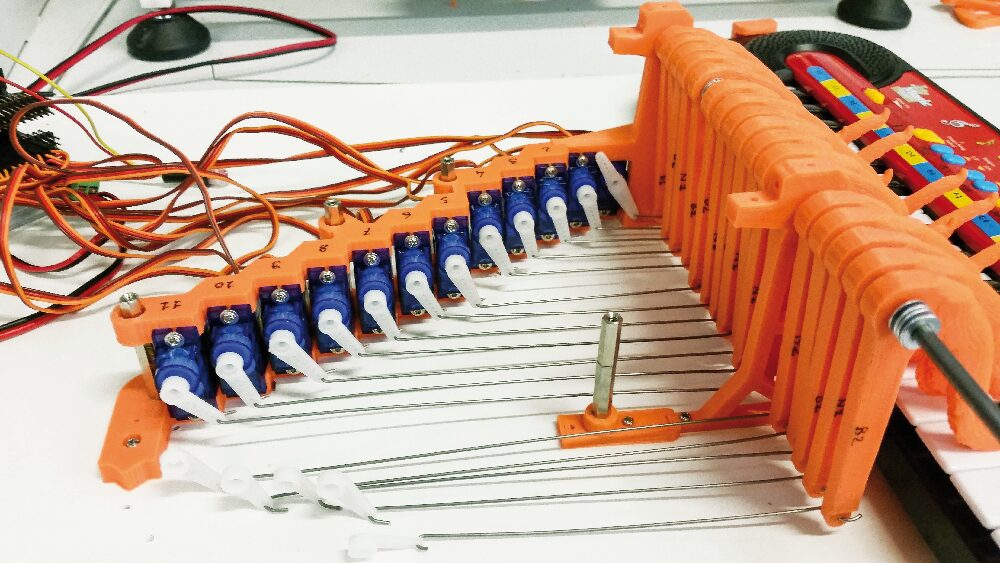
La gestione dei toni è affidata ad uno sketch appositamente creato per la nostra board, mentre il controllo fisico dei tasti è ottenuto mediante un sistema elettromeccanico composto da 24 servomotori (cod. SERVO206 del catalogo Futura Elettronica, reperibili su www.futurashop.it) gestiti da due shield Octopus (codice OCTOPUS Futura Elettronica) a cui sono collegati gli otto tentacoli di tre amene piovre color rosso stampate in PLA con la stampante 3D, azionati dai servo mediante un semplice ma preciso sistema di leveraggio (Fig. 2).
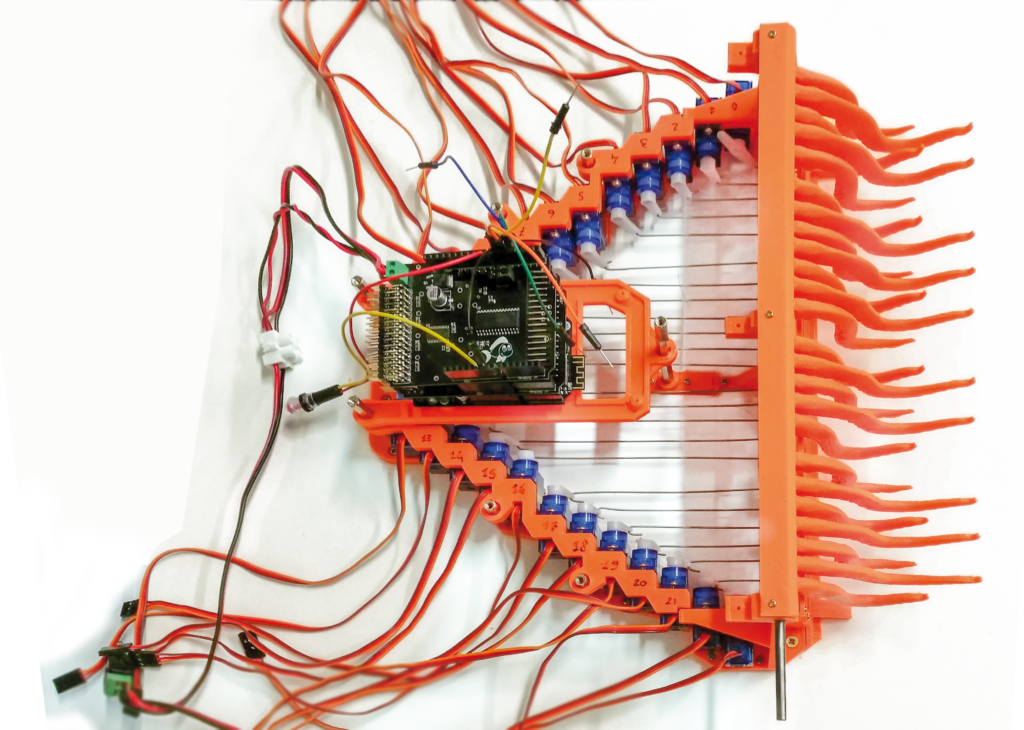
Fig. 2 Il sistema di attuatori, comprendente la meccanica, i servocomandi e la board Fishino Uno con sopra gli shield Octopus.
Tramite i 24 servo è possibile gestire due ottave (sulla pianola da noi utilizzata corrispondono alla 4^ e alla 5^ del pianoforte), quindi 12 tasti per ottava corrispondenti alle 7 note intere (Do, Re ecc..) più i semitoni (ad esempio Do Diesis o RE Bemolle).
Per chi volesse approfondire l’argomento, i tasti di ciascuna ottava sono convenzionalmente i seguenti:
C = nota DO
C# = DO Diesis o RE Bemolle
D = nota RE
D# = RE Diesis o Mi Bemolle
E = nota MI
F = nota FA
F# = FA Diesis o Sol Bemolle
G = nota SOL
G# = SOL Diesis o LA Bemolle
A = nota LA
A# = LA Diesis o SI Bemolle
B = nota SI
Le note intere sono i tasti bianchi e quelli neri rappresentano i semitoni standard della tastiera del pianoforte.
Schema di cablaggio della piovra che suona il piano con OCTOPUS
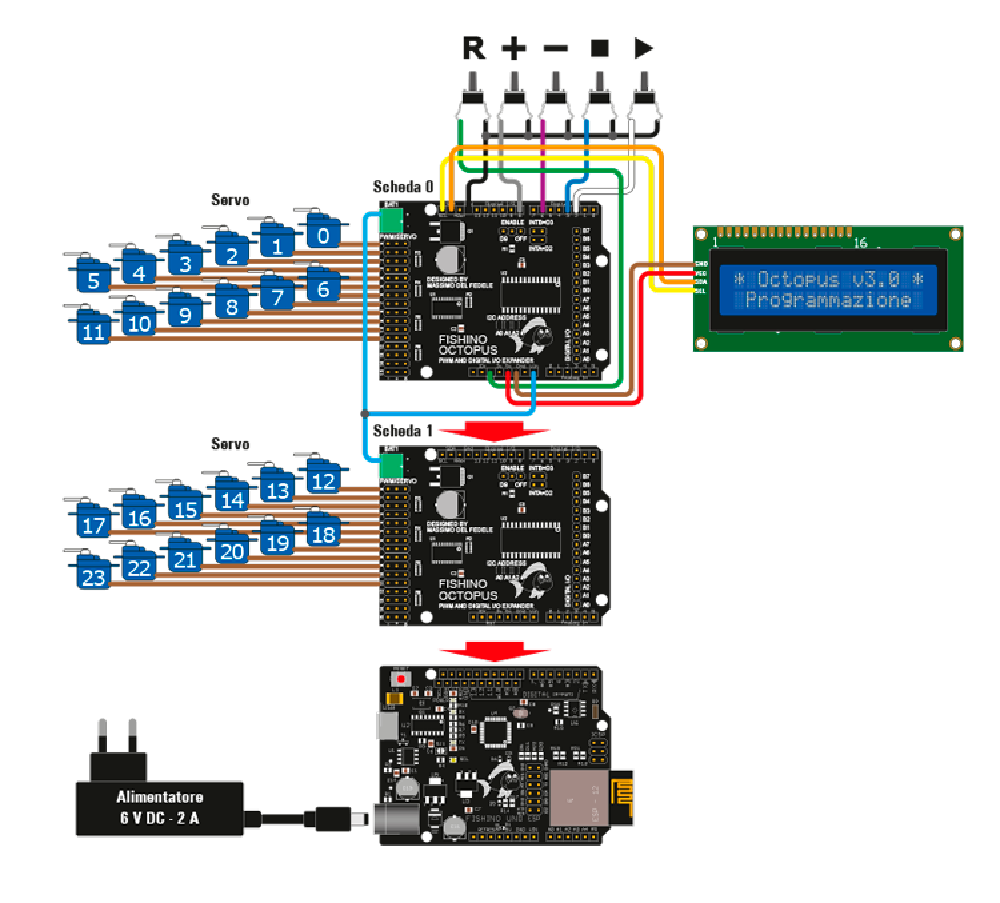
Sulla scheda Fishino Uno (o Arduino UNO) si montano uno sull’altro due shield Octopus, ognuno dei quali controlla 12 servocomandi per modellismo collegati ciascuno a uno dei connettori preposti. È importante collegare allo shield chiamato Scheda 0 i primi 12 servo (quelli che comanderanno i tasti a sinistra della pianola) e allo shield Scheda 1 gli ultimi 12 (tasti di destra). Dai pin degli header si prendono i segnali per il conAtrollo del display LCD e per i pulsanti, che prenderanno posto sul pannello di controllo. L’alimentazione si fornisce a Fishino Uno, che la distribuisce agli shield e da essi a display e servocomandi.
Il sistema
Bene, detto ciò possiamo entrare nel vivo del progetto, che consta di un’elettronica e una meccanica (l’insieme è visibile, smontato, nella Fig. 2) quindi ci limitiamo a dire che gli shield sono due e vengono impilati uno sull’altro su Fishino Uno. Gli shield sono gestiti attraverso l’I²C-Bus di quest’ultimo.
Sebbene gli shield Octopus dispongano di 16 uscite per controllo di servo, nella nostra applicazione ognuna ne pilota 12; le schede prelevano l’alimentazione per i servocomandi dal pin Vin di Fishino (qui arrivano circa 5,25V) e quella per il proprio funzionamento dal pin 5V. L’intero sistema viene alimentato da un alimentatore switching da 6V – 2A che fornisce tutta la corrente necessaria alla Fishino Uno.
L’interfaccia utente è rappresentata da un display LCD 2 righe e 16 caratteri alfanumerici (cod. LCD1602ABLU Futura Elettronica) a cui è stata applicata un’interfaccia I²C (cod. LCDI2CINTERFACE Futura Elettronica) e da un tastierino a 5 pulsanti che permettono di selezionare il tono che si desidera riprodurre ed anche di effettuare la taratura dei servo ed eseguire un test di verifica della pressione dei tasti della pianola.
Agli header sono collegati i cinque pulsanti, come segue:
Mem/PLAY -> pin 2
Più -> pin 8
Meno -> pin 6
Esci/STOP -> pin 3
R -> pin di reset/riavvio di Fishino
Invece il display è collegato così:
SDA display -> SDA
SCL display -> SCL
Vcc display -> 5V
GND display -> GND.
I pin sono, anche in questo caso, quelli degli header. L’utilizzo di un display con interfaccia I²C permette di limitare il numero minimo di pin della board Fishino Uno utilizzati.
Nella Fig. 3 potete vedere come abbiamo realizzato il pannello di controllo del nostro sistema, che poi è stato collocato nella parte posteriore dell’insieme, appena sotto all’elettronica di controllo formata da Fishino Uno e dagli shield Octopus.

Fig. 3 Il pannello di controllo contenuto in un contenitore stampato in 3D con del PLA.
Parte meccanica
Dopo aver analizzato l’elettronica del progetto, occupiamoci della meccanica, che è ugualmente importante perché è la sezione attuatrice che interviene fisicamente sui tasti della pianola.
Tutta la struttura necessaria a sostenere i 24 tentacoli e a ospitare gli altrettanti servomotori (provvisti ciascuno di un braccetto avvitato all’alberino con le viti in dotazione), nonché le schede elettroniche (il telaio, quindi…) è stata progettata con Google SketchUp e realizzata mediante stampa 3D con del PLA; il telaio vero e proprio si stampa utilizzando il file STL da noi fornito insieme agli altri file del progetto (sketch ecc.) nella sezione download in fondo a questo post.
Al telaio devono poi essere applicati i particolari metallici richiesti per l’assemblaggio delle parti, come il fulcro dei tentacoli; più esattamente, il telaio consta di più parti (lati, elemento di congiunzione posteriore, traversa anteriore…) da unire mediante viti.
Ciascun servocomando aziona un tentacolo (anche questo realizzato per stampa 3D il cui file STL è reperibile sul nostro sito insieme agli altri file del progetto) mediante un’astina di rinvio (opportunamente sagomata) ottenuta stirando un filo in acciaio inox da 0,9 mm di diametro (Fig. 4).

Fig. 4 Tentacolo e relativa asta di rinvio.
Il filo va poi ripiegato per vincolarlo sia dalla parte dell’albero del servocomando, sia dal lato del foro previsto nel tentacolo corrispondente (Fig. 5).
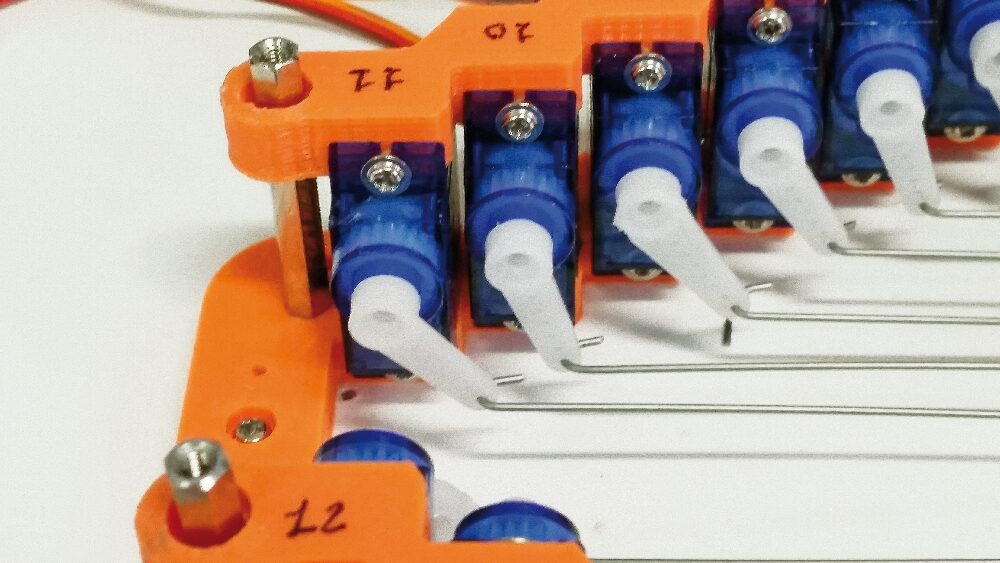
Fig. 5 Dettaglio dell’azionamento dei tentacoli da parte dei servocomandi, tramite la relativa asta di rinvio piegata per entrare nel braccetto dei servo.
L’insieme dei tentacoli è libero di oscillare per assecondare il movimento imposto dai servocomandi; allo scopo ogni tentacolo, disposto affiancato agli altri, è imperniato su un’asta in metallo da 4 mm di diametro.
La lunghezza delle aste di rinvio non è uguale ma va scelta di volta in volta sulla base delle distanze tra il braccetto del servocomando e la base della leva di attuazione del tentacolo corrispondente, come si vede nella Fig. 6, che mostra l’insieme della meccanica di un lato (manca la parte destra dei servocomandi e il relativo sostegno.
La Fig. 7 dettaglia, invece, l’aggancio delle aste alla base dei tentacoli, Le fotografie fatte al prototipo chiariscono meglio d’ogni parola come si assembla la struttura meccanica, la quale, una volta terminata, va montata a ridosso della pianola, frontalmente, in modo che ogni tentacolo prema uno dei tasti.

Siccome è probabile che la pianola si sposti durante il funzionamento a causa della pressione esercitata dai tentacoli, è opportuno vincolare il telaio alla stessa: ad esempio con delle strisce metalliche ripiegate a squadra all’altezza del fondo dello strumento musicale, oppure appoggiando e avvitando la meccanica a una piastra di base in legno o plastica (forex, per esempio…) e fissando alla stessa, una volta determinata la posizione ottimale, la pianola mediante squadrette in plastica opportunamente stampate in 3D e avvitate alla piastra di base).
La Fig. 8 propone un possibile fissaggio dell’insieme.

Fig. 8 La meccanica a ridosso della tastiera della pianola.
Funzioni dei tasti
Bene, descritta anche la parte meccanica possiamo vedere come si utilizza e quindi in che modo possiamo far suonare il nostro speciale strumento.
Descriviamo di seguito il funzionamento dei pulsanti.
• Mem/PLAY: permette di avviare l’esecuzione del tono occupante la posizione visualizzata sul display. Se tenuto premuto all’accensione permette di entrare in “Modalità impostazione posizione servo”.
• Più: permette di passare al tono successivo. In “Modalità impostazione posizione servo” permette di modificare la posizione del tentacolo al fine di premere + o – il tasto della pianola. Se viene tenuto premuto all’accensione permette di entrare in modalità TEST.
• Meno: permette di passare al tono precedente. In “Modalità impostazione posizione servo” permette di modificare la posizione del tentacolo al fine di premere + o – il tasto della pianola. Se tenuto premuto all’accensione permette di entrare in modalità TEST.
• Esci/STOP: permette di interrompere l’esecuzione di un tono. Se viene premuto quando ci si trova in “Modalità impostazione posizione servo” permette di uscire da tale modalità e di tornare alla schermata principale.
• R: permette di resettare e/o riavviare il sistema.
Reset della posizione di tutti i servo
Prima di applicare la leva di comando, facente capo al tentacolo, sul perno di ciascun servo, occorre posizionare tutti i servo a metà corsa (posizione centrale, -90°); tale operazione è necessaria per essere certi che una volta portati a zero i servocomandi, i braccetti siano tutti nella posizione che lascia a riposo i tentacoli.
Per effettuare il reset della posizione di tutti i servocomandi bisogna premere e tenere premuto il tasto Esci/STOP quindi fornire alimentazione; il display indicherà la scritta “Reset in corso” dopodiché tutti i perni dei servo si collocano in posizione centrale e sul display apparirà la scritta “Reset eseguito”.
Ora rilasciate il tasto. Fatto ciò applicate su ciascun perno la propria levetta in modo che il relativo tentacolo sfiori (senza premere) il corrispondente tasto della pianola.
Modalità programmazione
Vediamo adesso come si programma la posizione di pressione del tasto corrispondente al singolo tentacolo. Ad ogni servo deve essere assegnata una posizione che permette la pressione del tasto assegnato. Per effettuare l’impostazione del caso bisogna seguire la procedura seguente.
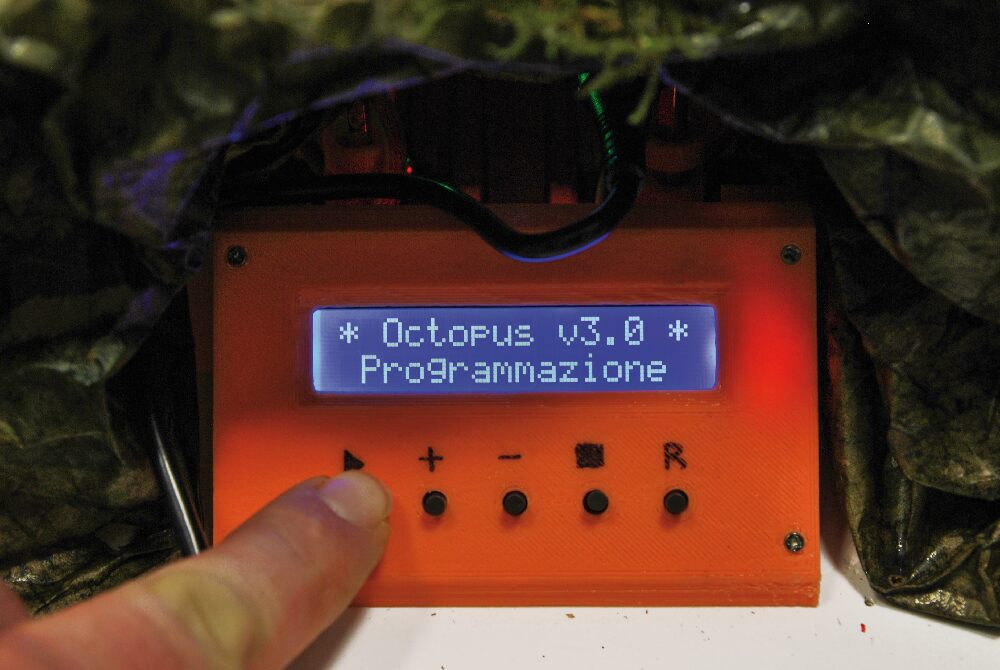
1) Accendere la pianola, premere e tenere premuto il tasto Mem/PLAY quindi fornire alimentazione; il display visualizza la scritta “Programmazione” (Fig. 9).
2) Rilasciare il tasto. Il servo gestito sarà il primo a sinistra (la prima nota della prima ottava); il display visualizzerà la scritta “Programmazione Servo no.1” (Fig. 10).

Fig. 10 Programmazione dei servo.
3) Premere il tasto + o – in modo che il relativo tentacolo prema sul corrispondente tasto quanto basta per emettere la nota. Raggiunto l’obbiettivo, premere nuovamente il tasto Mem/PLAY per passare alla programmazione del servo successivo.
4) Giunti all’ultimo servo premere il tasto Mem/PLAY per concludere la programmazione (sul display apparirà la scritta “Programmazione Completata” (Fig. 11).

TEST del sistema
Ora verificate se tutti i tentacoli premono correttamente il tasto assegnato: per fare ciò bisogna:
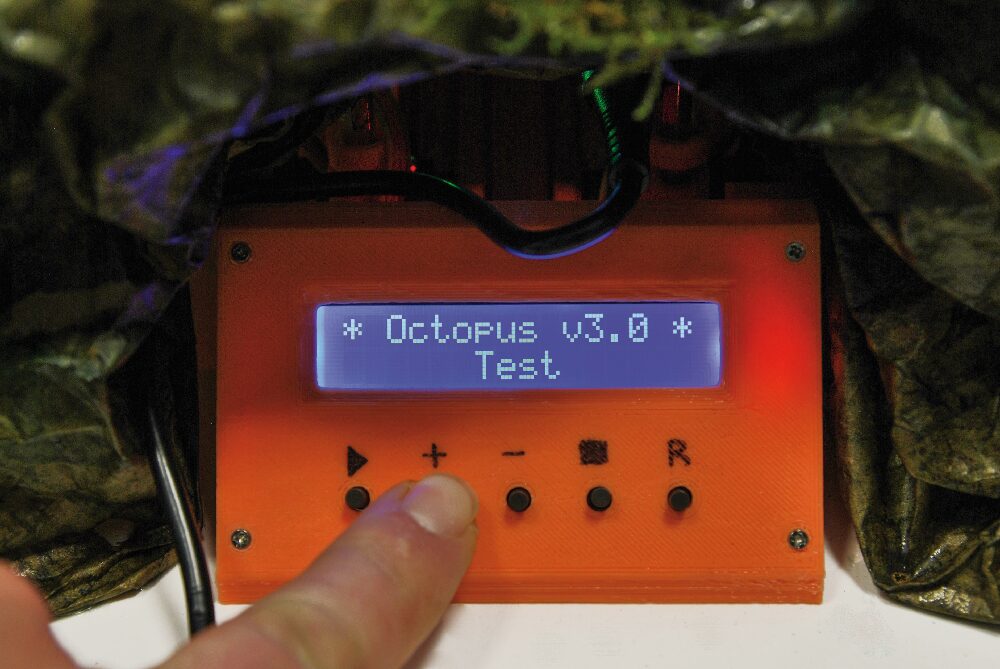
• accendere la pianola, premere e tenere premuto il tasto Più (o Meno) quindi fornire alimentazione; il display visualizza la scritta “Test” (Fig. 12).
• Rilasciare il tasto.
Ora i tentacoli verranno azionati in successione, da sinistra verso destra, così da verificare la corretta pressione di tutti i tasti ad essi assegnati. Al termine del test il sistema tornerà alla schermata principale “Scelta traccia”.
Scelta traccia / PLAY / STOP
Quando il sistema è in standby, sul display appare la scritta “Scelta traccia” seguita dal numero della traccia (della suoneria) attuale (Fig. 13). Per avviare l’esecuzione della traccia indicata premete il tasto PLAY (il display mostra ad esempio “Play Traccia no.1”); per arrestare l’esecuzione premete STOP.
Per scegliere un’altra traccia premete il tasto Più o il Meno (il comando non ha effetto se il pulsante viene premuto durante l’esecuzione della traccia); prima ricordate di premere STOP.

Il firmware
Concludiamo questo articolo con un accenno al firmware, nel quale sono contenuti sia i Ringtone da riprodurre, sia le istruzioni per suonarli.
Partiamo proprio dagli RTTTL, dicendo che nel sistema è previsto ne vengano suonati 30: ciò viene definito nell’istruzione int Tracce_Max = 29; nell’inizializzazione dello sketch. Notate che 30 corrisponde al valore 29 perché si considera di partire da 0. Modificando tale valore si può modificare il numero massimo di suonerie richiamabile.
Ciascun motivo viene costruito secondo lo standard RTTTL, che prevede la definizione di ogni nota con la relativa durata, separata da una virgola dalla seguente e dalla precedente.
Il formato tipico di una stringa è:
const char PROGMEM MusicSongPlay1[] = “wewish:d=4,o=5,b=140:d,g,8g,8a,8g,8f#,e,c,e,a,8a,8b,8a,8g,f#,d,f#,b,8b,8c6,8b,8a,g,e,8d,8d,e,a,f#,2g.”; che riguarda l’esecuzione del Ringtone wewish, composto dalle note definite dalla lettera con, seguita da uguale, la durata, quindi d=4, o=5, b=140 ecc. (d è la durata, o l’ottava e b le battute).
Notate che tali istruzioni possono essere composte scrivendole nell’IDE Arduino, ovvero copiate direttamente dai siti sul web che riportano i Ringtone, dato che li espongono con detta sintassi.
In genere tali siti forniscono dei file che si possono aprire con un editor di testo (sono dei .txt); per scrivere la musica vi basta copiare la stringa di testo interessata e incollarla nell’editore dell’IDE di ARduino.
Nello sketch, ciascuna nota viene definita dall’istruzione del tipo:
#define NOTE_C4 262
che specifica la posizione del servo da far attivare per premere il tasto corrispondente sulla tastiera della pianola.
Quanto all’indirizzamento degli shield, la libreria Octopus.h è preimpostata in modo che le uscite 0÷15 competano allo shield indirizzato come 0, le 16÷32 a quello indirizzato come 1, ecc. Quindi prima di applicare gli shield ad Arduino o Fishino dovete impostare i jumper dell’indirizzo del primo shield come 000 e quelli del secondo come 001, altrimenti non verrà rispettata la corrispondenza tra note e servocomandi stabilita dal firmware.
Lo sketch per Arduino/Fishino è piuttosto voluminoso e, per ragioni di spazio, non possiamo riportarlo in queste pagine; lo potete comunque trovare e scaricare nella sezione Download del nostro sito www.elettronicain.it, insieme agli altri file del progetto.
Bene, con questo diciamo che abbiamo concluso; lasciamo a voi e alla vostra fantasia eventuali sviluppi e personalizzazioni.