Costruisci la tua Smart Car e programmala con micro:bit
micro:bit è una piccola scheda progettata dalla BBC come oggetto finalizzato a sviluppare le capacità logiche, e le competenze, nel campo della programmazione dei computer, nei giovani che frequentano i primi cicli della scuola.
L’iniziativa è stata coronata da successo e diversi produttori hanno sviluppato e commercializzato dispositivi aggiuntivi per ampliare le possibilità offerte dal micro:bit.
La Smart Car con micro:bit ci ha particolarmente incuriosito, in quanto permette di sperimentare un’ampia gamma di situazioni tipiche di ciò che viene definito “physical computing” utilizzando un unico kit di costo contenuto.
Tra le opportunità di sperimentazione, per quanto riguarda il micro:bit utilizzato singolarmente, possiamo elencare:
• la gestione di una matrice di LED 5 x 5;
• l’utilizzo di un accelerometro in grado di rilevare e riconoscere diversi tipi di movimento come lo scuotimento, le rotazioni e la caduta libera;
• l’utilizzo di una bussola elettronica in grado di rilevare l’orientamento e la rotazione in gradi rispetto al Nord. Un’ulteriore possibilità potrebbe essere l’utilizzo come rilevatore di metalli (magnetici);
• l’utilizzo di due pulsanti sia singolarmente che premuti in contemporanea;
• l’utilizzo del modulo Bluetooth Smart Technology che permette di connettere il micro:bit con altri dispositivi dotati della stessa tecnologia, come altri micro:bit, PC, smartphone, kit Bluetooth, tablet e fotocamere;
• l’utilizzo del modulo a radio frequenza per la comunicazione tra due o più micro:bit;
• la misura della temperatura ambiente utilizzando il termometro integrato;
• la possibilità di comunicazione via bus I2C ed SPI.
L’associazione con la scheda di espansione permette le seguenti funzionalità aggiuntive:
• la comunicazione di comandi per mezzo di un telecomando ad infrarossi;
• la generazione di note e melodie musicali utilizzando il buzzer cablato sulla scheda di espansione;
• la gestione multicolore di due LED RGB da 10 mm;
• la gestione multicolore di ulteriori tre LED RGB;
• sulla scheda sono replicati i pin che fanno riferimento ai bus seriale, I2C ed SPI;
• sulla scheda sono inoltre replicati i pin delle periferiche del micro:bit non utilizzate dalla scheda di espansione. In particolare i pin P4, P5, P6, P7, P10;
• l’alimentazione da batteria agli Ioni di Litio con circuito di ricarica integrato nella scheda di espansione.
Le ulteriori funzionalità sono fruibili in modo ottimale assemblando completamente il kit “robot” che include i motori, le ruote ed il sensote ad ultrasuoni. In questa configurazione sono accessibili le ulteriori funzionalità:
• il controllo dei motori;
• l’utilizzo dei sensori frontali (agli infrarossi e agli ultrasoni) per il controllo dell’ambiente circostante. Questi permettono di sperimentare funzionalità come evitare ostacoli e seguire oggetti;
• l’utilizzo dei sensori inferiori, agli infrarossi, per programmare un inseguitore di linea.
Infine, come ultima ciliegina, il tutto è controllabile per mezzo di una app per smartphone Android. In alternativa alla app è utilizzabile l’ambiente di sviluppo standard JavaScript Blocks Editor.
I componenti della Smart Car con micro:bit
In Fig. 1 riportiamo la descrizione dei pin del connettore del micro:bit mentre in Fig. 2 riportiamo il layout della scheda di espansione con l’indicazione dei dispositivi montati sulla scheda e la loro disposizione sulla stessa.
Alcune note sulla scheda di espansione del rover per micro:bit:
• il connettore per l’alimentazione e la ricarica della batteria non è utilizzabile per programmare il micro:bit. L’operazione di programmazione del micro:bit deve essere eseguita collegando il cavo USB, proveniente dal PC, direttamente al connettore USB presente sul micro:bit;
• la ricarica della batteria è garantita dall’integrato LTC4056, appositamente progettato per la ricarica ed il mantenimento in carica degli elementi agli Ioni di Litio. Lo stato di carica della batteria è indicato da due LED: il LED CHA (indicatore di carica in corso) rosso ed il LED END di colore verde che indica che la carica è terminata;
• L’integrato PCA9685, un driver PWM a 16 canali, pilotato tramite bus I2C, interfaccia tutti i device che richiedono un segnale PWM per essere pilotati, tra i quali i due motori in corrente continua, i due LED da 10 mm, i sensori di linea, le uscite per i servocomandi aggiuntivi e per il sensore all’infrarosso per evitare gli ostacoli. Nella Tabella 1 diamo un’indicazione di quali pin dell’integrato PCA9685 fanno capo ai diversi sensori ed attuatori, mentre in Tabella 2 sono elencati i collegamenti ai pin del micro:bit.
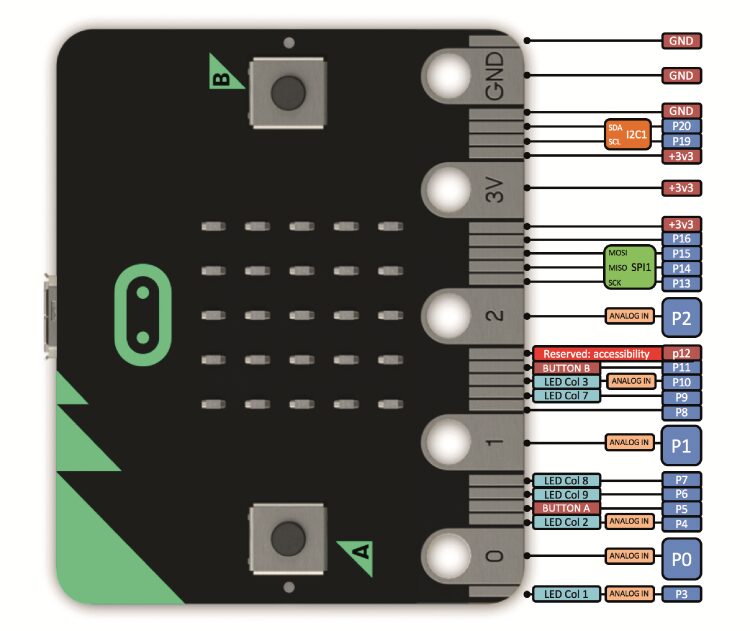
Fig. 1 – Pin disponibili sul connettore del micro:bit.
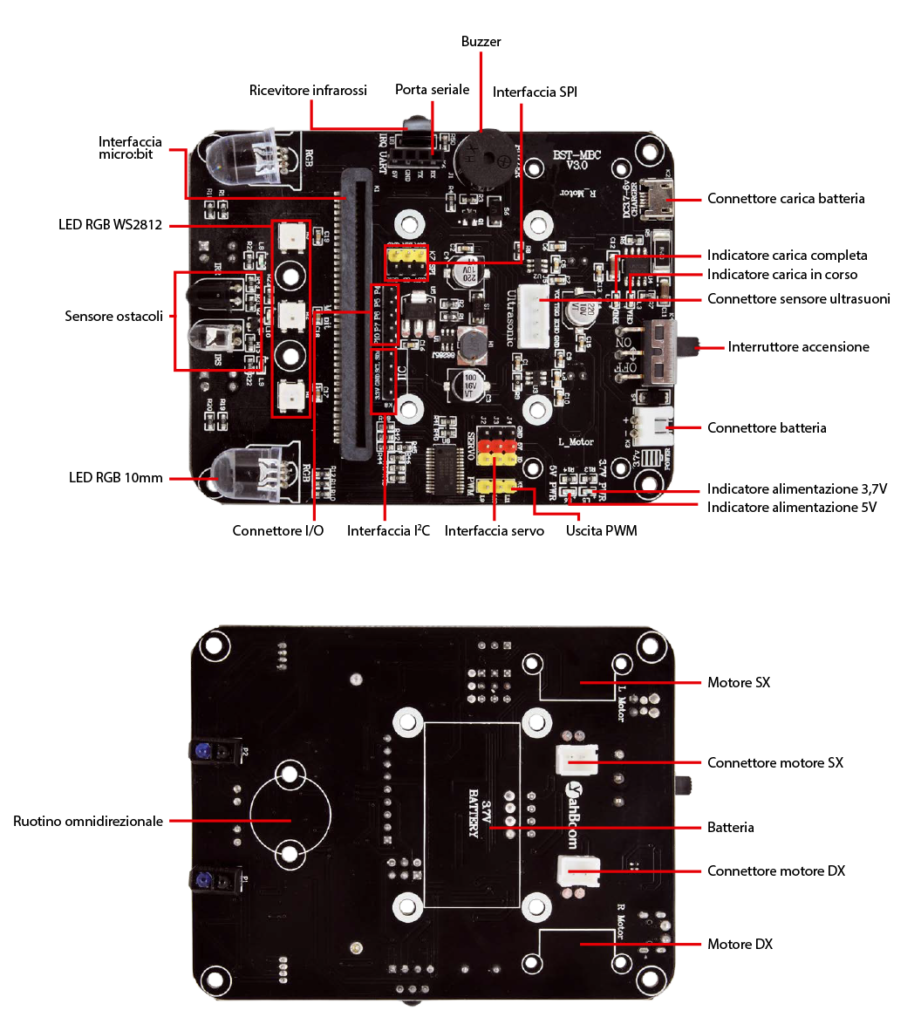
Fig. 2 – Viste superiore e inferiore della scheda di espansione Smart Car con micro:bit
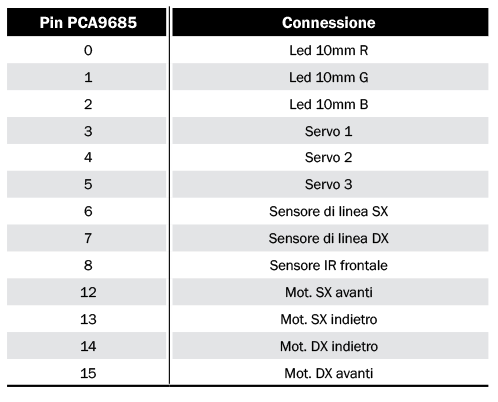
Tabella 1 – Collegamenti all’integrato PCA9685.
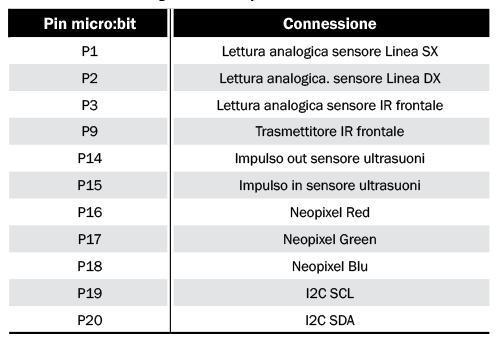
Tabella 2 – Collegamenti ai pin del micro:bit.
Costruzione della Smart Car con micro:bit
Il piccolo robot didattico viene fornito in forma di kit parzialmente assemblato. La scheda di espansione è completamente montata mentre gli altri componenti devono essere montati prima dell’utilizzo. In questo modo non è necessario eseguire saldature. Tenete presente che nella confezione della Smart Car, distribuita da Futura Elettronica, è compreso il micro:bit.

Fig. 3 – Contenuto della confezione della Smart Car con micro:bit
La confezione, visibile in Fig. 3, contiene i seguenti componenti:
• 1 x scheda micro:bit;
• 1 x scheda espansione micro:bit;
• 1 x sensore a ultrasuoni con cavo
di collegamento;
• 2 x motori;
• 1 x piastra di supporto per il sensore
a ultrasuoni;
• 2 x pneumatici;
• 1 x cavo micro usb;
• 1 x controllo remoto a infrarossi;
• 1 x cacciavite;
• 4 x M3*40 colonnine in rame;
• 2 x M2*10 colonnine in rame;
• 2 x supporti sensore ultrasuoni;
• 1 x batteria al litio;
• 1 x manuale di istruzioni;
• 1 x ruotino omnidirezionale;
• 2 x supporti motore;
• viti e dadi.
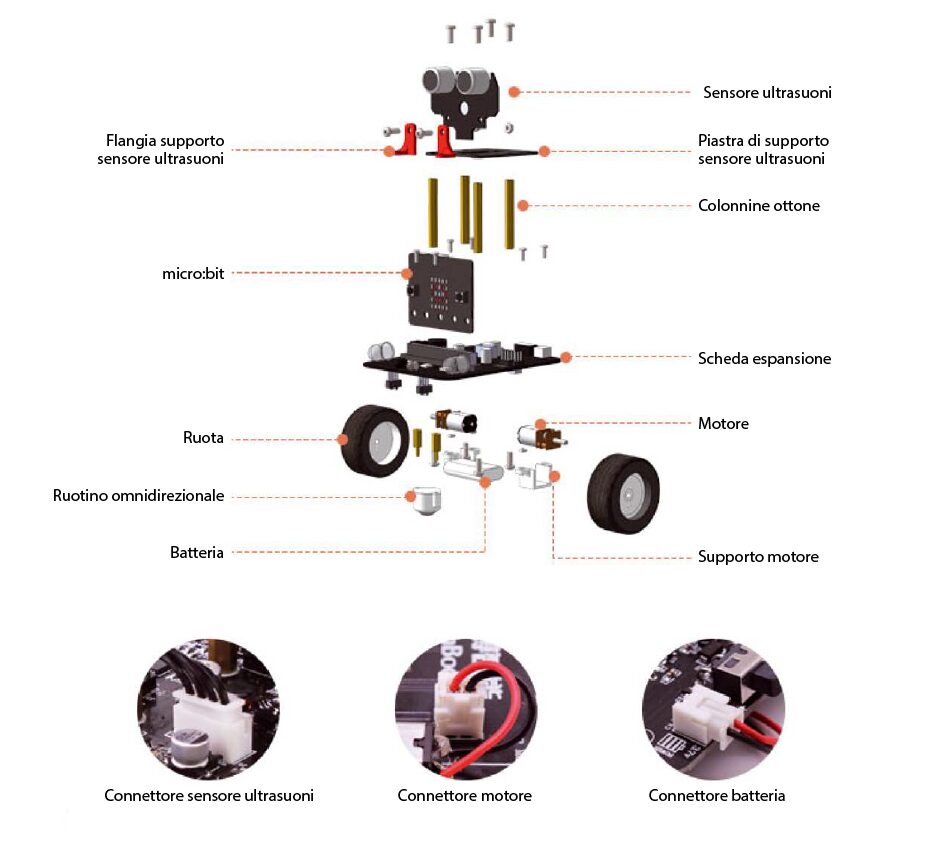
Fig. 4 – Schema di montaggio della Smart Car.
Nella Fig. 4 è visibile lo schema di montaggio che prevede le seguenti operazioni:
1. Montaggio dei motori utilizzando gli specifici supporti bianchi e le viti da 2x6mm e relativi dadi (viti dalla parte della scheda di supporto e dadi dalla parte dei supporti motore). Collegate i cavi dei motori agli appositi connettori a fianco degli stessi facendo attenzione al verso di collegamento;
2. Una volta montati i motori inserite le due ruote sugli assi dei motori esercitando la pressione necessaria (senza esagerare);
3. Posizionate il ruotino omnidirezionale e fissatelo con due viti da 2x6mm e relativi dadi (viti dalla parte della scheda di supporto e dadi dalla parte del ruotino);
4. Montate le quattro colonnine in ottone da 3x40mm che forniranno il supporto per il sensore ad ultrasuoni. Fissate le viti dalla parte del telaio. Poi posizionate la basetta di supporto superiore con la parte più lunga rivolta verso le ruote della Smart Car. Fissate le due viti posteriori da 3x8mm. Posizionate le due flange di sostegno del sensore a infrarossi e fissatele alla basetta e alle colonnine anteriori con due viti 3x8mm.
5. Collegate il cavo al sensore ad ultrasuoni;
6. Fate passare il cavo nel foro rettangolare della basetta di supporo.
Collegatelo al connettore sulla scheda di espansione ed infine fissate il sensore ad ultrasuoni alle due flange con le viti da 3x8mm e relativi dadi. Viti inserite dalla parte anteriore e dadi dalla parte delle flange;
7. Verificate che il deviatore di alimentazione sia in posizione “spento”, ovvero con la levetta verso il connettore della batteria. Posizionate la batteria sul suo alloggiamento e collegate i cavi al corrispondente connettore, di fianco al deviatore di accensione, facendo attenzione al verso. Collegate i cavi dei motori agli appositi connettori a fianco degli stessi facendo attenzione, anche in questo caso, al verso di collegamento;
8. Inserite il micro:bit nell’apposito connettore, con i LED rossi rivolti verso la parte anteriore della Smart Car, quella con il ruotino. Le ruote di trazione sono nella parte posteriore.
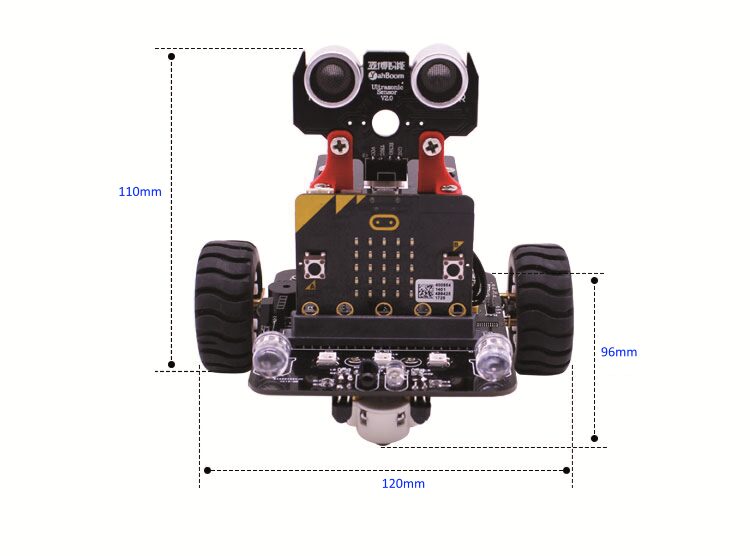
Fig. 5 – Smart Car completamente assemblata e relativi ingombri.
In Fig. 5 è visibile l’aspetto finale della Smart Car con le relative dimensioni. Una volta completato l’assemblaggio, come prima operazione è opportuno eseguire una ricarica della batteria. Collegate un alimentatore da 5V con connettore micro USB (quello dei telefonini), al connettore “CHARGE” della scheda di supporto, con il deviatore nella posizione di spento. Si accenderà il LED rosso che indica che la batteria è in carica. La fine della carica verrà indicata dallo spegnimento del LED rosso e dall’accensione di quello verde di fine carica. Ora siamo pronti per la prima programmazione della Smart Car.
Programmazione ed utilizzo della Smart Car con micro:bit
Sono disponibili diversi ambienti per la programmazione del micro:bit, la caratteristica della maggior parte di questi è la loro disponibilità via web, senza necessità di installare software sul proprio PC. Dopo aver caricato nella cache del browser le applet degli ambienti di sviluppo, è possibile scrivere i propri programmi anche in assenza di un collegamento internet. Per i dispositivi mobili, come tablet e smartphone, oltre che gli ambienti web sopra citati sono disponibili anche “app” gratuite scaricabili dagli store dei provider.
Prima di iniziare dobbiamo collegare il micro:bit al nostro PC utilizzando il cavo USB incluso nella confezione. Una volta collegato, micro:bit dovrebbe venire riconosciuto immediatamente come una memoria di massa USB. Nel caso di Windows XP verrà richiesto di installare il relativo driver. Ora collegatevi al sito di riferimento di micro:bit
Nella pagina principale cliccate sul pulsante “Let’s Code” e vi troverete nella pagina che elenca i diversi ambienti di programmazione. Per programmare il micro:bit in modo da poter interagire con la scheda di espansione della Smart Car dobbiamo utilizzare l’ambiente di sviluppo Javascript Block Editor, un ambiente di sviluppo a blocchi che si ispira alla soluzione adottata da Scratch.
Javascript BLOCK EDITOR per micro:bit
Come Scratch è molto semplice da usare ma non è un giocattolo. Permette di approfondire la programmazione strutturata e la gestione di eventi.
Il metodo di composizione di un programma consiste nello scegliere i blocchi che rappresentano le istruzioni, trascinarli nel pannello dell’editor, configurarli nelle parti personalizzabili ed “incastrarli” in modo corretto. In questa operazione si è facilitati dalla forma dei blocchi. I blocchi si connettono solo se sono compatibili e le forme corrispondono. Chiaramente questo meccanismo non garantisce che la logica che si va a realizzare sia formalmente corretta, almeno dal punto di vista sintattico. Anche in questo ambiente di sviluppo vi sono blocchi molto “espressivi”, come quello disponibile per configurare il display a LED.
Una volta terminata la fase di programmazione è possibile eseguire il codice, appena scritto, in ambiente di simulazione, per eseguire i test di correttezza, prima di trasferire il codice stesso sul micro:bit fisico. Per attivare l’ambiente di simulazione si deve cliccare sull’icona “Restart the simulation”, quella centrale in basso a sinistra. Una volta entrati nell’ambiente di simulazione possiamo provare le diverse funzionalità.
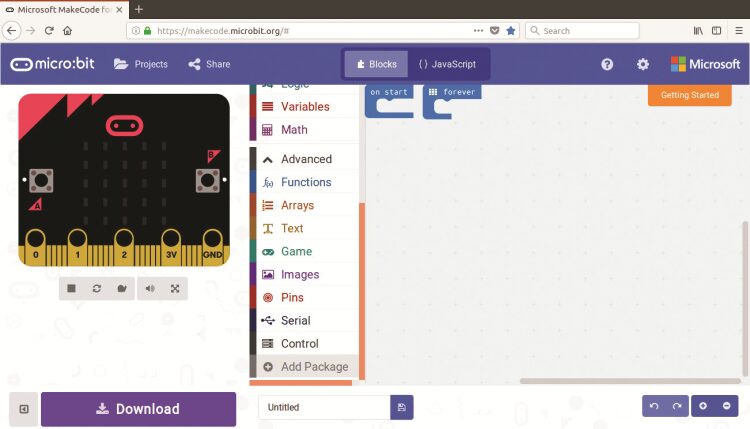
Fig. 6 – Ambiente di sviluppo Javascript Block Editor.
Dopo aver aperto l’ambiente di sviluppo, per iniziare a programmare la Smart Car, è necessario arricchire l’ambiente di sviluppo stesso con l’estensione al Javascript Block Editor per la Smart Car. Per far questo cliccate sulla voce “Advanced” del menu laterale a sinistra, che riassume le librerie di blocchi di programmazione disponibili. In fondo alla tendina cliccate sulla voce “Add Package” come visibile in Fig. 6.
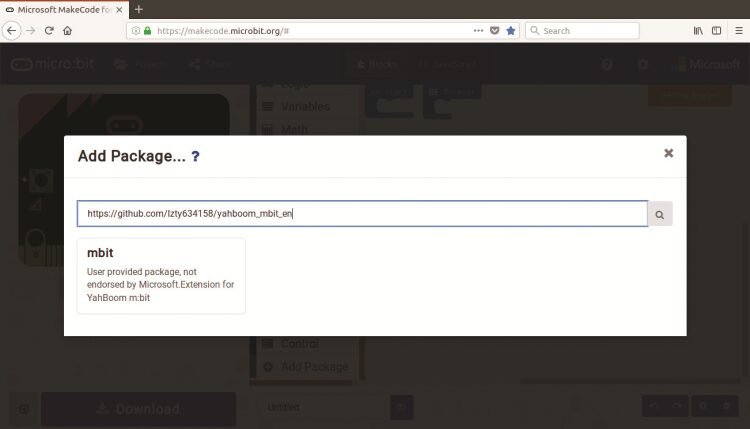
Fig. 7 – Finestra per aggiungere i blocchi di controllo della Smart Car.
Si apre la finestra visibile in Fig. 7. In questa finestra inserite l’indirizzo: https://github.com/lzty634158/yahboom_mbit_en che punta al repository GitHub che contiene la libreria di blocchi specializzata per la Smart Car.
Una volta inserito l’indirizzo cliccate sull’icona di ricerca che, come risultato, vi visualizzerà la libreria “mbit”. Cliccatevi sopra ed i blocchi verranno aggiunti alla barra del menu laterale (Fig. 8).
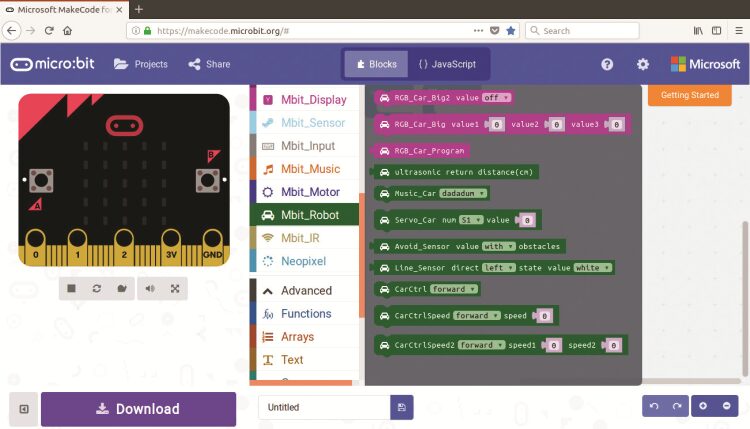
Fig. 8 – Nuovi blocchi disponibili per il controlllo della Smart Car.
Una breve nota sul funzionamento della libreria. Alcuni blocchi presenti nella libreria facilitano la programmazione dei LED e dei sensori, fornendo un’interfaccia a più alto livello rispetto a quella che richiede l’impostazione dei singoli pin. Il valore aggiunto della libreria è quello di offrire diversi blocchi di controllo, come appunto quelli per l’impostazione dei LED e per il controllo dei motori, che interfacciano i singoli pin di generazione PWM dell’integrato PCA9685. Questa impostazione permette di ampliare di molto le funzionalità disponibili nel micro:bit usato da solo e di semplificarne, nel contempo, al massimo, l’utilizzo.
Come primo esempio di utilizzo, abbiamo scelto un’applicazione, tra quelle disponibili sul sito di tutoring della Smart Car, che permette di comandare il funzionamento del “robottino” utilizzando il telecomando a infrarossi.
Scorrete la pagina fino alla Sezione “3 – Robot lessons”. Cliccate sulla voce “3.9 – Infrared Control”.
Nella pagina che si apre potete eseguire il download del codice del progetto stesso.
Ora, dalla finestra di programmazione, caricate il programma nell’ambiente di sviluppo, cliccando sull’icona a forma di cartelletta e scegliendo poi il programma “microbit-Lesson-9-Infrared-control.hex” del quale avete appena eseguito il download come visibile in Fig. 9. Cliccate sul pultante “Go ahead” per continuare.
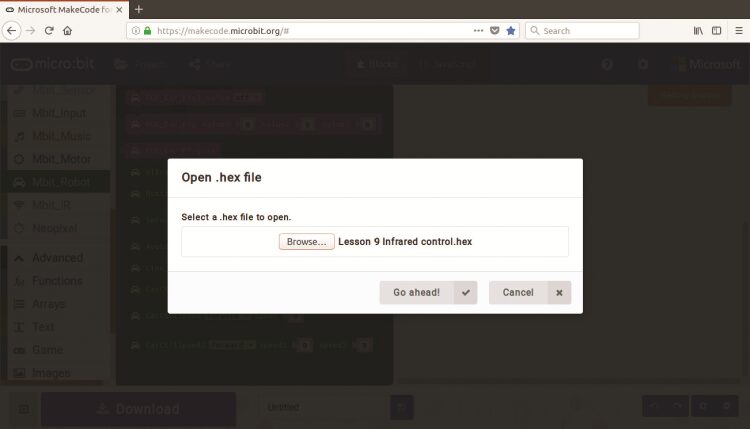
Fig. 9 – Selezione del programma da caricare nell’ambiente di sviluppo.
Data la quantità di documentazione disponibile per l’ambiente Scratch ci limitiamo a suggerirvi solo alcune modifiche al programma che avete aperto per limitare la velocità della Smart Car.
In tutti i blocchi dove vedete impostata la velocità a “255” modificate i valori come visibile in Fig. 10, in modo da limitare la velocità della Smart Car, il valore di velocità 255, che viene poi trasformato nel duty cicle assegnato al PWM di controllo dei motori, la rende un oggetto incontrollabile. Con l’occasione riordinate anche i blocchi in modo da renderne più … razionale la disposizione. Un esempio è visibile in Fig. 10. Fatto?
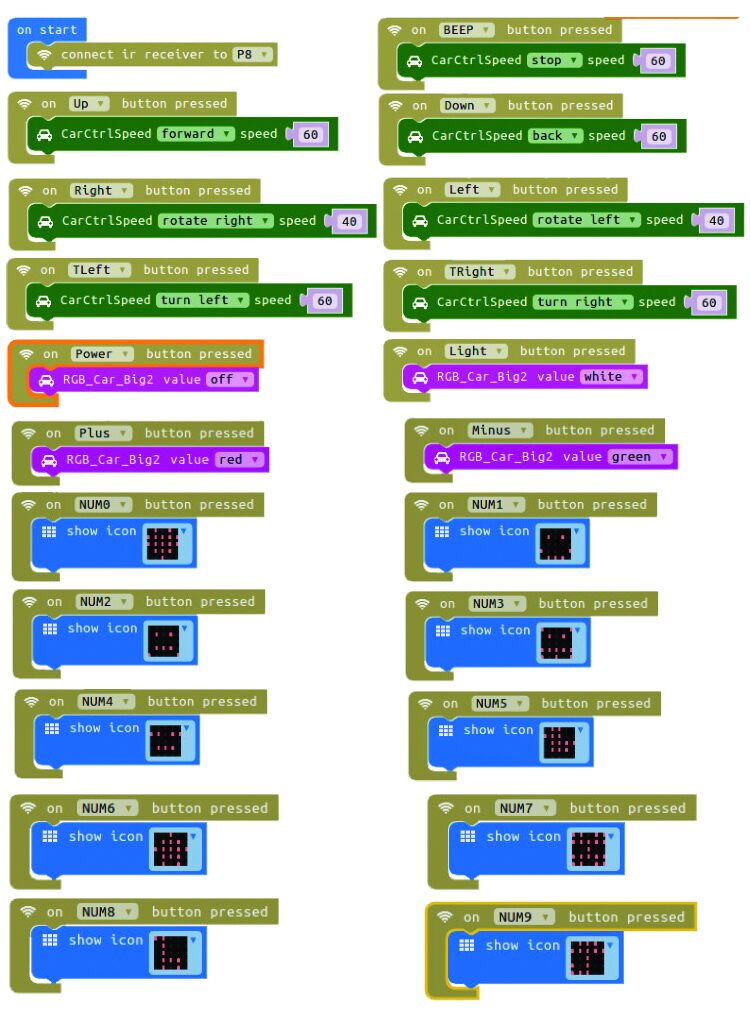
Fig. 10 – Codice per il controllo della Smart Car con il telecomando.
Eseguite il download del programma, una volta in una vostra cartella in modo da avere un backup e poi, successivamente, nel file system del micro:bit, che dovrebbe apparirvi tra le memorie di massa del vostro PC con la sua letterina di identificazione. Ricordate di collegare il cavo USB proveniente dal vostro Pc al connettore USB del micro:bit e non a quello della scheda di espansione, altrimenti non si carica nulla.
Alla fine del download, scollegate il cavo USB e prendete il telecomando. La prima volta dovete togliere la protezione della batteria, altrimenti … niente infrarossi.
Una breve descrizione delle funzioni del telecomando è visibile in Fig. 11.
Il tasto “1” spegne tutti i LED eventualmente accesi.
Il tasto “2”, col disegno della lampadina, accende i LED RGB con luce bianca.
I tasti “4” (“+”) e “5” (“-”) permettono di accendere i LED con luce, rispettivamente verde e rossa.
I tasti del blocco “2”, permettono di pilotare il movimento dalla Smart Car. Il significato dei tasti è intuibile dai disegni di riferimento.
I tasti del blocco “6”, da zero a nove, invece, permettono di presentare sul display a matrice di LED diverse configurazioni di disegni.
Accendete la Smart Car con il deviatore di alimentazione. Attendete la partenza del programma e … buon divertimento. Ovviamente questa è solo la base sulla quale potete iniziare a sperimentare, modificando questo o gli altri programmi di esempio.
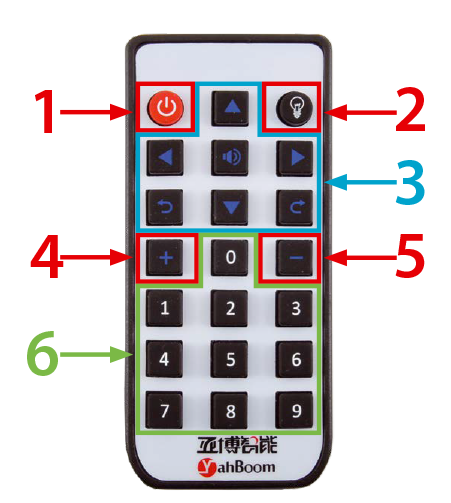
Fig. 11 – Il telecomando e le sue funzioni.