Sperimentiamo con il popolare I/O expander della Microchip, attraverso una scheda applicabile anche su breadboard, interfacciabile con Arduino.
Esistono varie situazioni pratiche in cui occorre gestire numerosi segnali e attuatori con un microcontrollore, che però non ha sufficienti pin di I/O; in tali situazioni è utile ricorrere a quegli integrati noti come I/O expander, la cui funzione è serializzare un certo numero di linee di input e output così da controllarle tramite un solo I/O, ovvero una linea di comunicazione seriale come può essere la comune e diffusissima I²C-Bus, presente in molti microcontrollori e, non ultime, nelle schede Arduino.
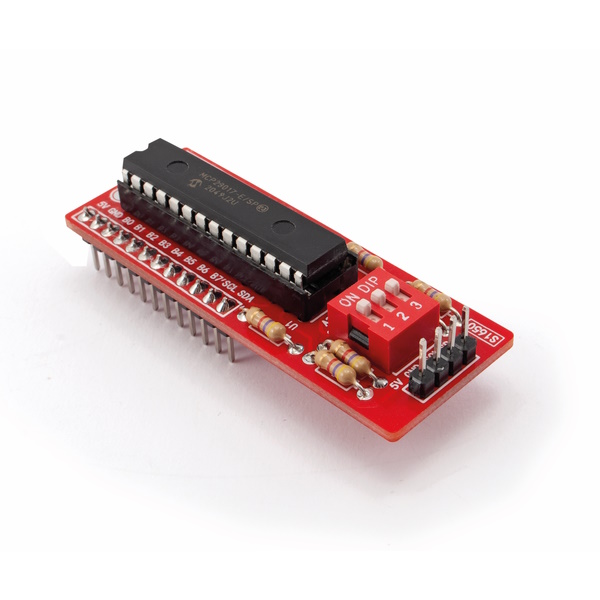
Per rispondere all’esigenza di moltiplicare (espandere, appunto, come dice il termine “expander”…) le linee di I/O, abbiamo realizzato la breakout board basata su MCP23017, che proponiamo in questo articolo, sulla quale troviamo tale integrato Microchip che è appunto un I/O expander a 16 bit, oltre all’hardware minimo per farlo funzionare, che nel caso specifico consiste in un dip-switch e qualche resistore di pull-up.
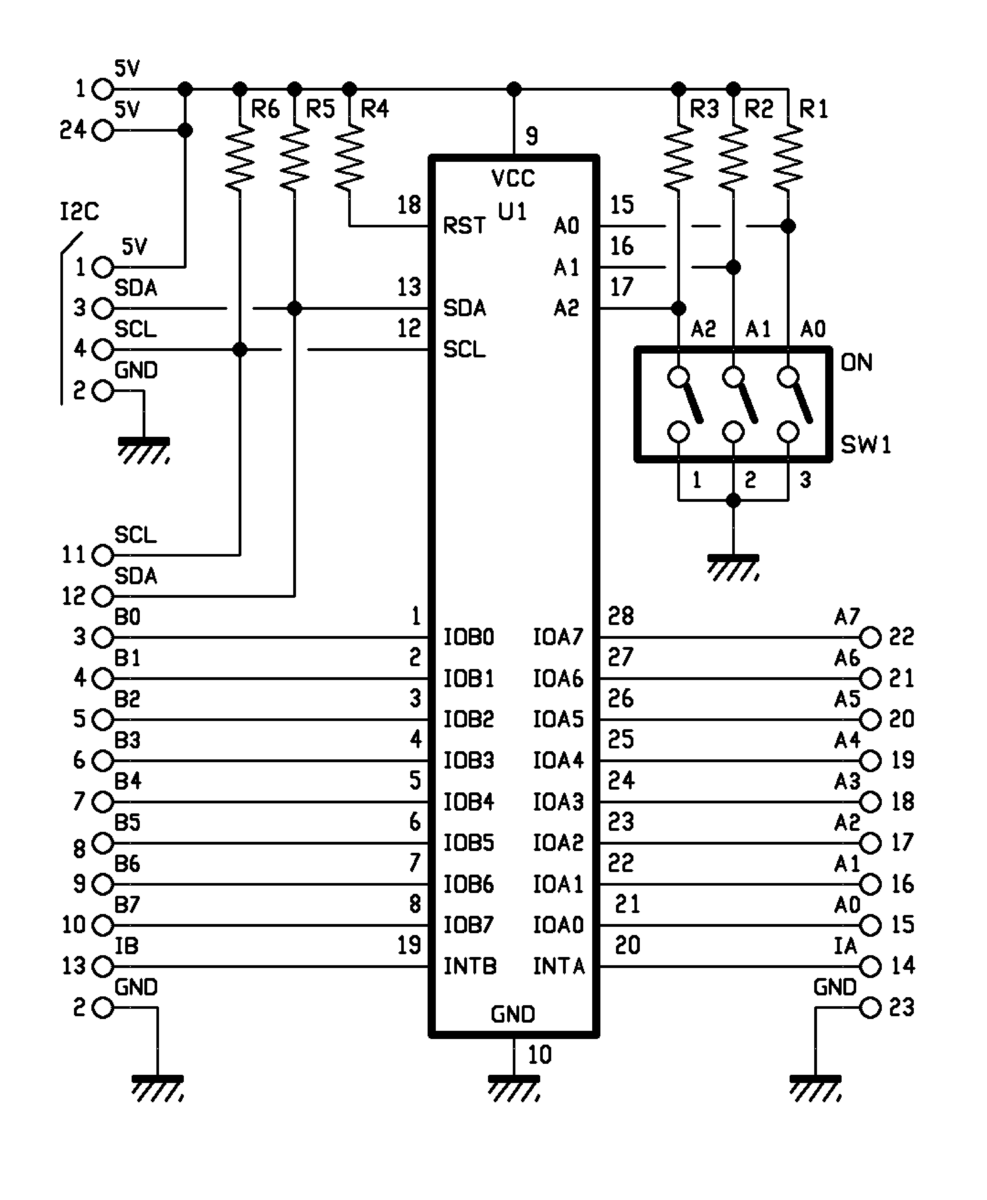
Ciò diventerà più chiaro guardando lo schema elettrico della scheda, che trovate in queste pagine.
Infine, per darvi un’idea di cosa si può realizzare con un I/O expander, vi proporremo un esempio applicativo dove la breakout board pilota una serie relé (otto in tutto) montati su una scheda pilotabile tramite livelli TTL o la pressione di pulsanti.
Ma andiamo con ordine ed analizziamo lo schema circuitale.
Schema elettrico dell’I/O expander
Come potete vedere, la breakout board è qualcosa di estremamente essenziale, perché a bordo vi troviamo l’integrato MCP23017 in versione DIP (a montaggio tradizionale) con riportati sulle piazzole laterali, che sul PCB sono a passo 2,54 mm in previsione del montaggio di pin-strip per l’inserzione in altre schede o su breadboard, tutti i piedini ad eccezione dei tre per l’impostazione dei bit meno significativi dell’indirizzo I²C-Bus di periferica.
Pertanto è stato previsto un dip-switch a 3 vie (siglato SW1 nello schema elettrico) per impostare l’indirizzo di comunicazione sull’I²C-Bus, i cui piedini A0, A1, A2, sono provvisti di resistori di pull-up che a dip-switch aperti li mantengono a livello logico alto.
Riepilogando, tutti i pin relativi agli I/O dei registri A e B sono stati portati in esterno su pin strip maschi. Questi pin sono stati disposti su entrambi i lati per poter connettere la nostra scheda con facilità, ad esempio alla scheda relé cod. RELAY8CH della Futura Elettronica, ma ovviamente sono pin I/O digitali, pertanto si può collegare tutto ciò che si vuole, nei limiti della corrente e tensione supportati dall’integrato MCP23017.
Oltre ai pin strip laterali a passo 2,54 mm, che permettono di ospitare il modulo anche in una breadboard, sono stati previsti altri 4 pin su uno strip (sempre a passo 2,54 mm) chiamato I2C, per poter collegare al bus direttamente nella parte superiore del modulo. Resta inteso che i soli pin laterali sono sufficienti per tutta la comunicazione e interfacciamento con il modulo, pertanto i quattro pin del connettore I2C sono posti in parallelo a quelli già esistenti sulla scheda.
Notate che sul circuito stampato, per praticità i pin del registro A sono stati riportati su un lato e quelli del B si trovano sul lato opposto, sempre nell’ottica di semplificare le connessioni.
I piedini facenti capo al bus I²C sono stati riportati sul pin-strip siglato I2C, insieme al positivo 5V e alla massa; entrambi sono provvisti di pull-up.
Il reset dell’I/O-expander nella nostra breakout board non è utilizzato, quindi per disattivarlo abbiamo posto il relativo piedino (il 18, RST…) a livello logico alto mediante il resistore R4.
Tra i pin laterali della scheda troviamo anche ripetute le linee GND e +5V.
L’elemento principale del circuito è chiaramente l’MCP23017, che possiamo considerare un convertitore I²C-Bus/parallelo, prodotto dalla Microchip (siglato U1); l’integrato, del quale vedete lo schema a blocchi interno in Fig. 1, funziona come periferica (Slave) del bus I²C e supporta le due modalità di input e output.
Nella prima permette di trasferire sul bus, su richiesta del dispositivo Master I²C-Bus, gli stati degli I/O del registro A e del B in formato seriale, un byte per ciascun registro; nella seconda, invece, va ad impostare le linee di I/O convertendo i dati in arrivo sul bus I²C nello stato corrispondente delle linee dei registri A e B.
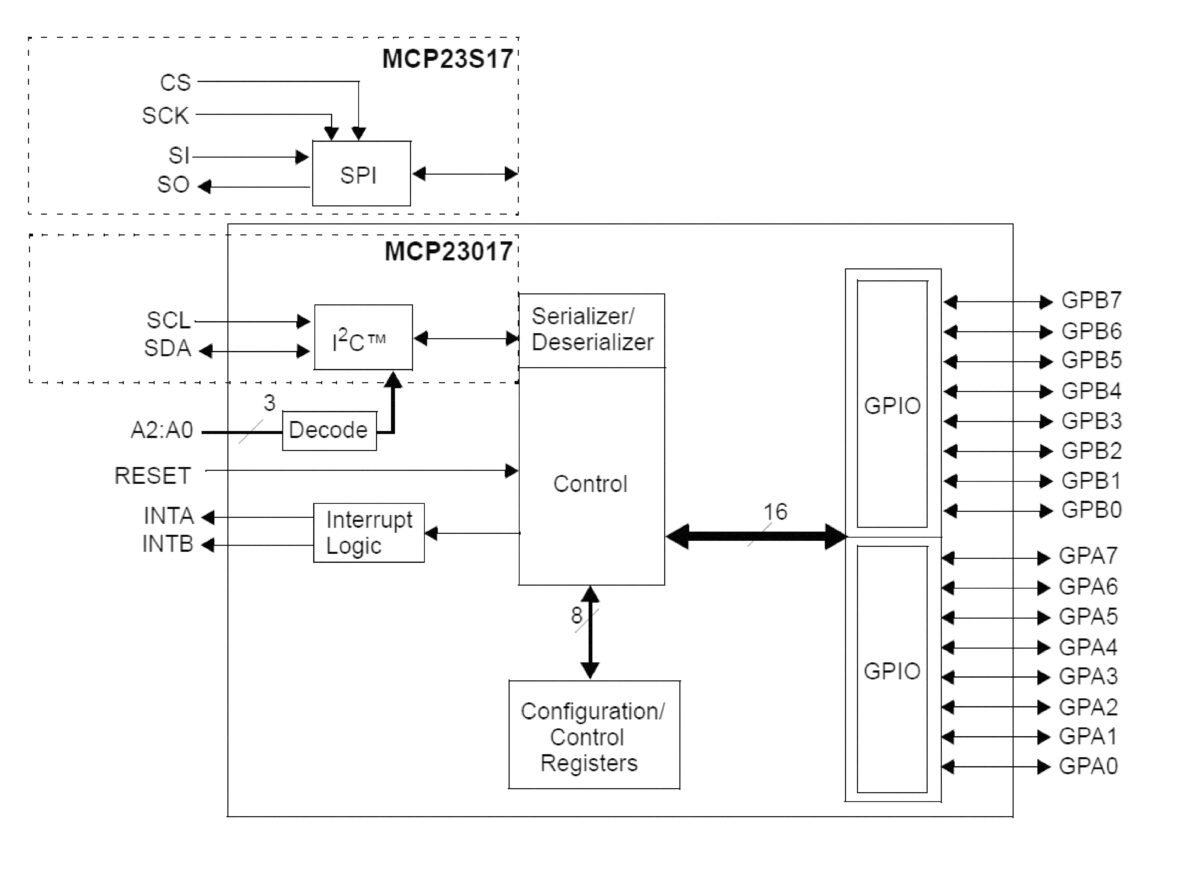
Fig. 1 Schema a blocchi dell’MCP23017: è riportata anche la variante SPI che contraddistingue l’MCP23S17
L’integrato MCP23017 fornisce un’espansione I/O seriale/parallela generica a 16 bit ed è disponibile in due versioni: quella qui utilizzata, dotata di interfaccia I²C-Bus e la MCP23S17, variante ad interfaccia SPI.
Il chip è un I/O-expander a 16 bit, ripartiti in due porte da 8 bit ciascuna, interfacciato mediante I²C-Bus; questo significa che con due soli fili, riferiti a massa, consente di acquisire lo stato di ben 16 linee (modalità input) ovvero impostare lo stato logico di esse (modalità output).
Le linee di I/O sono, per impostazione predefinita, funzionanti come input.
L’MCP23017 è costituito da più registri in configurazione a 8 bit per ingresso, uscita e selezione della polarità. Il master di sistema può abilitare gli I/O come ingressi o uscite scrivendo i bit di configurazione I/O (IODIRA/B) corrispondenti.
I dati per ogni ingresso o uscita sono conservati nel corrispondente registro di ingresso o di uscita.
La polarità di registro Input Port può essere invertita mediante il Polarity Inversion Register.
Tutti i registri possono essere letti dal master di sistema.
La porta I/O a 16 bit è funzionalmente composta da due porte a 8 bit, ossia port A e port B, cui fanno capi i piedini, rispettivamente 21÷28 e 1÷8.
L’MCP23X17 può essere configurato per funzionare nelle modalità a 8 bit o 16 bit; dispone inoltre dei due pin di interrupt, INTA e INTB, che possono essere associati alle rispettive porte (INTA per il Port A e INTB per Port B9 o possono essere assoggettati all’operazione logica OR in modo che entrambi i pin si attivino se entrambe le porte determinano un interrupt.
L’uscita di interrupt può essere configurata per l’attivazione in due condizioni (che si escludono a vicenda):
• quando uno stato di input è diverso dal suo corrispondente stato del registro della porta di ingresso; questa condizione è utilizzata per indicare al master di sistema che un stato di ingresso è cambiato;
• quando lo stato di un ingresso è diverso dal valore preconfigurato del registro (registro DEFVAL).
Le linee di interrupt INTA e INTB possono essere configurate come active-high, active-low oppure open-drain. Il registro Interrupt Capture acquisisce i valori delle porte nel momento in cui si attiva l’interrupt, memorizzando così la condizione che ha causato l’interrupt.
Il Power-on Reset (POR) imposta i registri sui loro valori predefiniti e inizializza la macchina a stati del dispositivo.
La necessità di funzionare in modalità bidirezionale si deve al fatto che ogni periferica I²C-Bus deve sia poter leggere (per esempio i comandi) sia poter inviare i dati acquisiti, ad 8+8 bit, lungo il bus.
Come tutte le unità per I²C-Bus, l’MCP23017 permette di impostarne l’indirizzo in un range di 8 indirizzi ed allo scopo dispone dei pin A0, A1, A2, i quali consentono di impostare gli address dell’unità Slave, se indirizzata direttamente dal Bus I²C; queste linee si impostano ciascuna mediante un interruttore del dip-switch SW1, per facilitare l’impostazione del caso: ogni dip chiuso imposta lo zero logico sul rispettivo address, mentre, viceversa, un dip aperto determina lo stato logico 1.
La possibilità di definire otto indirizzi consente di affacciare fino a otto I/O-expander sullo stesso bus e controllare quindi un massimo di 128 I/O con tre sole linee.
L’intero circuito prende alimentazione dal contatto 5V (in realtà abbiamo due contatti: 1 e 15, disposti sui lati lunghi della breakout board) riferita a massa (contatti GND, ossia 2 e 23 delle file laterali).
Con questo hardware, il funzionamento è il seguente: ogni volta che riceve una stringa lungo la linea SDA dell’I²C-Bus (scandita dal segnale di clock sulla linea SCL) l’integrato MCP23017 esegue il comando ivi contenuto (in questo caso quello che indica di caricare il byte di dati) e dispone le 8 linee di uscita IOA0÷IOA7 e IOB0÷IOB7 come i relativi bit, ovvero IOA0 assumerà lo stato del primo bit del byte 1, IOA1 quello del secondo e via di seguito.
Analogamente avverrà su IOB0÷IOB7, che rispecchieranno pari-pari i bit del secondo byte dati.
Naturalmente la conversione e presentazione sulle uscite avviene solo a condizione che la stringa ricevuta contenga l’indirizzo I²C-Bus corrispondente a quello impostato, mediante i dip-switch dell’SW1, per l’U1. Alla ricezione di ogni stringa l’integrato aggiorna lo stato delle proprie uscite e i rispettivi livelli logici determinano l’accensione (o la permanenza nello stato di riposo) dei LED componenti i segmenti del display; se non viene inviata alcuna stringa successivamente, il display mantiene il numero visualizzato, perché le uscite dell’integrato MCP23017 sono dotate di latch.
Quanto esposto vale per la modalità output, ossia in scrittura dello stato dei due byte I²C-Bus sui registri di uscita A e B; se invece il comando proveniente dal bus è di lettura, l’MCP23017 acquisisce lo stato degli I/O di ciascun registro e genera due byte, contenenti il primo lo stato di IOA0÷IOA7 e il secondo la condizione logica di IOB0÷IOB7, quindi li invia lungo il bus I²C come risposta.
Per ogni applicazione cui vorrete destinare la breakout board, nella Tabella 1, vi riportiamo la corrispondenza tra gli address e l’impostazione dei dip-switch.
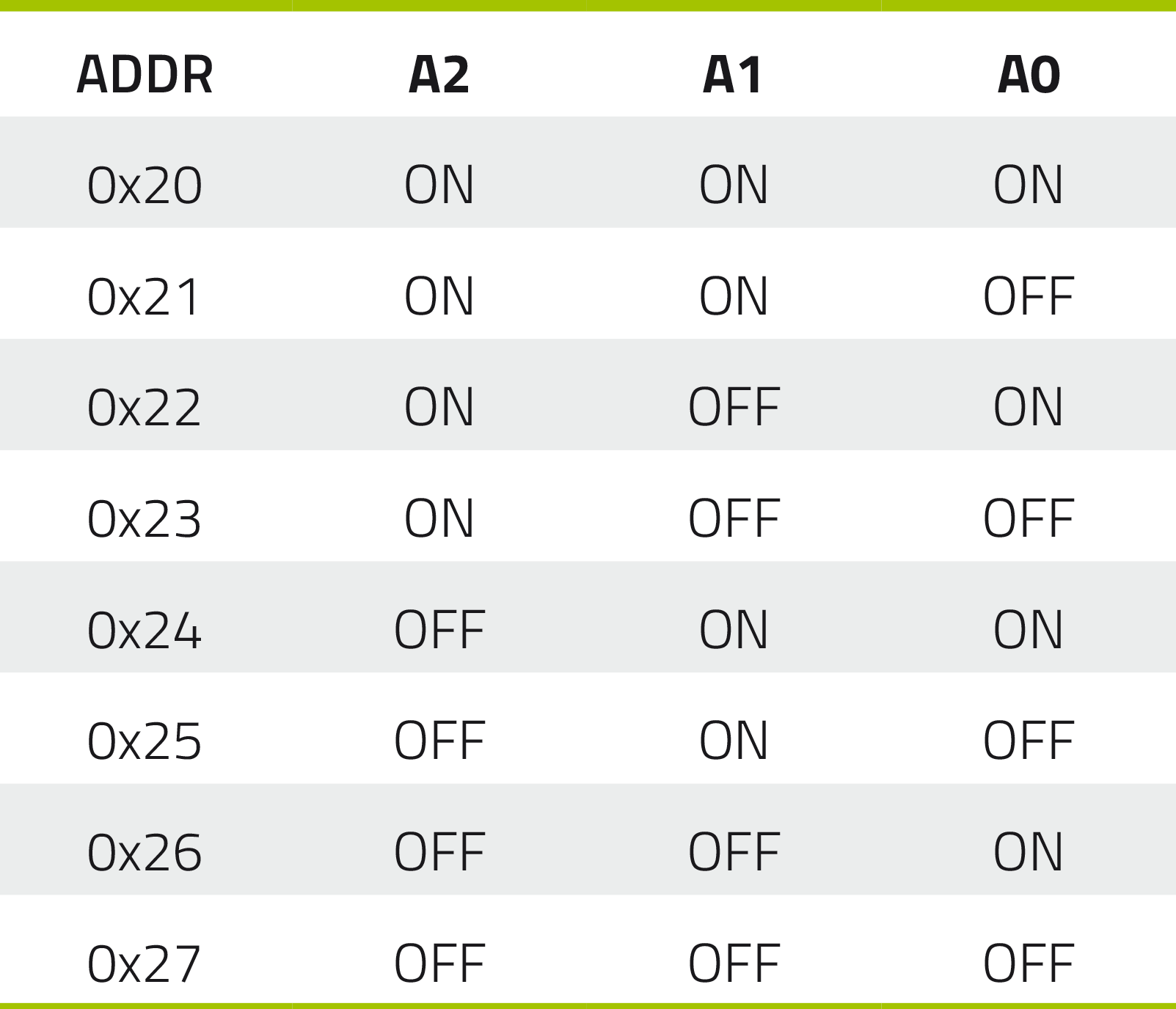
Tabella 1 Impostazione dell’indirizzo di periferica dell’MCP23017
Piano di montaggio dell’espansione
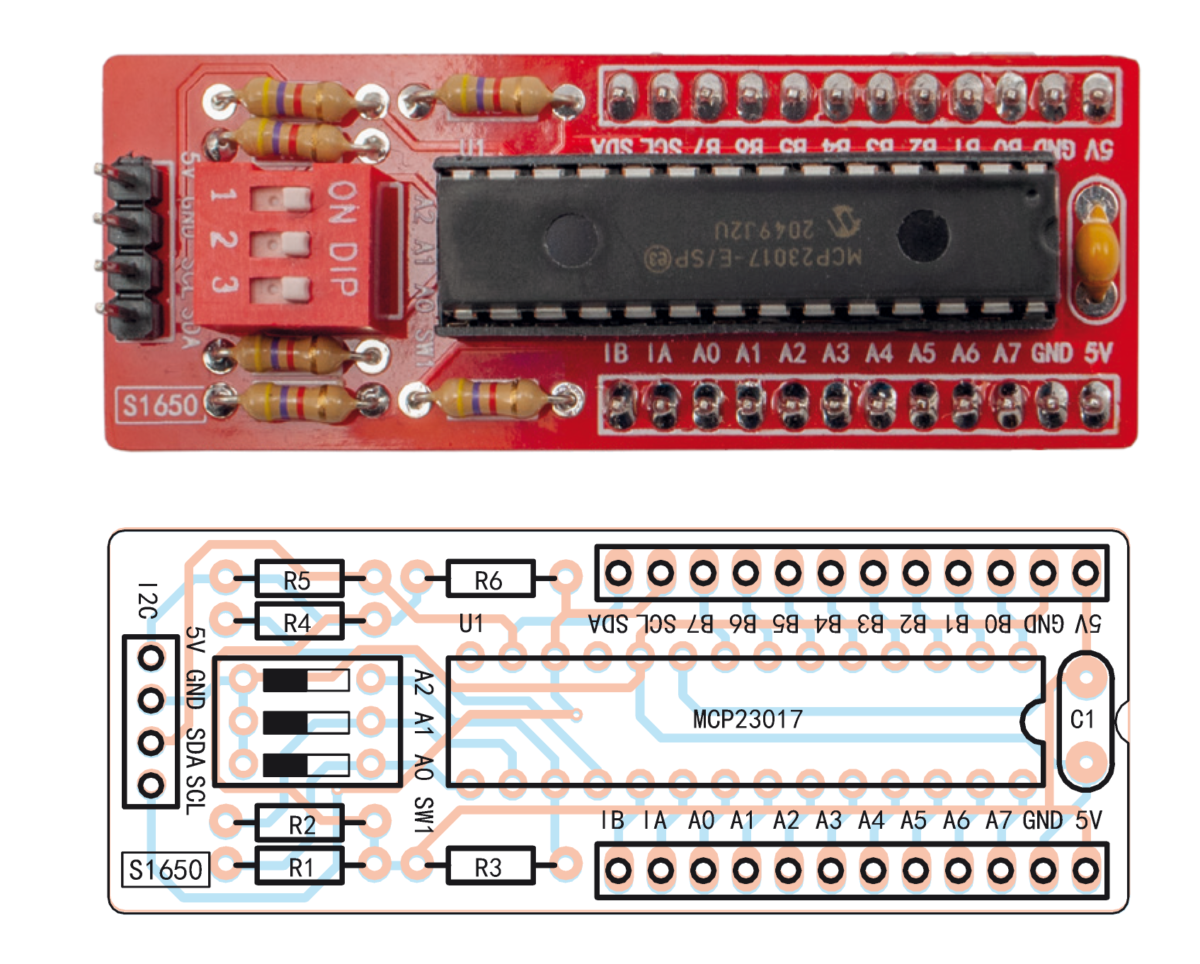
Elenco Componenti:
R1, R2, R3, R4, R5, R6: 4,7 kohm C1: 100 nF ceramico SW1: Dip-switch 3 vie U1: MCP23017-E/SP Varie: - Zoccolo 14+14 - Pin strip Maschio 12 vie (2 pz.) - Pin strip Maschio 4 vie (1 pz.) - Circuito stampato S1650 (61x23 mm)
Utilizziamo l’I/O espander con MCP23017 con Arduino
La breakout board nasce per essere interfacciata a un microcontrollore, giacché tipicamente gli I/O-expander vengono utilizzati da dispositivi provvisti di interfaccia seriale a I²C-Bus; siccome Arduino supporta questo bus, abbiamo realizzato un esempio di codice per leggere gestire gli I/O dell’MCP23017 tramite Arduino.
Rendiamo disponibile il codice di esempio nella pagina dell’I/O expander (FT1650) affinché possiate scaricarlo e scriverlo nella vostra scheda tramite l’IDE.
Questo sketch sostanzialmente consente di scrivere lo stato del registro Port A in funzione di un byte inviato da Arduino lungo il bus, i cui bit corrispondono allo stato letto sul Port B, che stavolta funziona da ingresso.
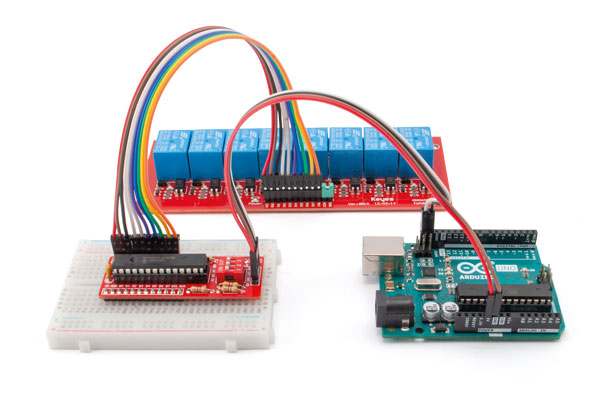
Per dare all’esempio un’applicazione concreta, abbiamo deciso di utilizzare gli stati logici degli I/O del Port A, che qui opereranno come uscite digitali, per pilotare una scheda a relé; nello specifico, bisogna collegare le 8 linee di comando delle uscite a relé della scheda RELAY8CH della Futura Elettronic al banco I/O del Port A, mentre al Port B sono da collegare 8 pulsanti normalmente aperti, aventi in comune il polo collegato a GND.
Per realizzare questa applicazione occorre collegare Arduino UNO, la breakout board, la scheda relé e i pulsanti, come mostrato nello schema di cablaggio proposto in Fig. 2.
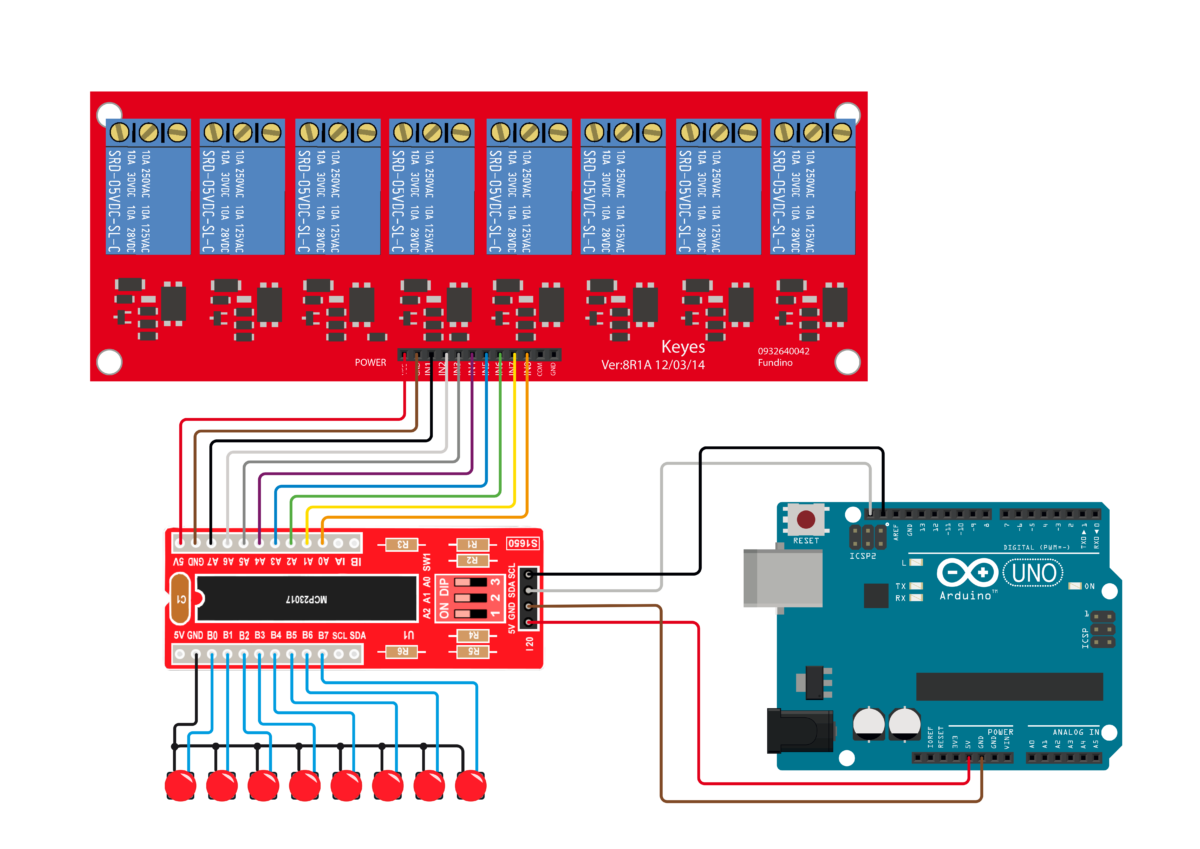
Fig. 2 Schema di cablaggio della applicazione di controllo relé tramite pulsanti
Trattandosi di normalissimi pulsanti (nello specifico, normalmente aperti) e non avendo elettronica esterna, sono state abilitate le pull-up interne dell’MCP (mediante libreria) in modo da gestirli e riconoscere il cambiamento di stato, in questo modo abbiamo attivato l’uscita rispettiva quando il pulsante viene portato a massa (GND).
Per realizzare tutto ciò, è stato scritto un codice molto semplice basato su Arduino UNO, sfruttando la libreria Adafruit, la quale, come vedete nel Listato 1, viene inclusa nella prima riga dello sketch con l’istruzione:
Listato 1
#include <Adafruit_MCP23X17.h>
Adafruit_MCP23X17 mcp;
int i = 0;
int OUT[] = {
7,
6,
5,
4,
3,
2,
1,
0
}; //Rappresenta il PIN dell’MCP23017 (A7...A0)
int IN[] = {
8,
9,
10,
11,
12,
13,
14,
15
}; //Rappresenta il PIN dell’MCP23017 (B0...B7)
int STATO[] = {
0,
0,
0,
0,
0,
0,
0,
0
}; //Per ogni uscita viene salvato lo stato ad ogni commutazione
void setup() {
Serial.begin(9600);
Serial.println(“MCP23017 INPUT / OUTPUT”);
if (!mcp.begin_I2C(0x20)) //0x20 è l’indirizzo dell’MCP23017 con A0=A1=A2 > ON(GND)
{
Serial.println(“MCP Errore!”); //Se l’MCP non viene trovato si visualizza l’errore
while (1);
}
//Pin del banco A come uscite e del banco B come ingressi
//La variabile STATO a 0 ad indicare uscite a riposo
for (i = 0; i & lt; 8; i = i + 1) {
mcp.pinMode(OUT[i], OUTPUT);
mcp.pinMode(IN[i], INPUT_PULLUP);
STATO[i] = 0;
}
}
//******************* L O O P **********************
void loop() {
String Testo_Debug = “”;
for (i = 0; i & lt; 8; i = i + 1) {
//Se pulsante premuto o uscita non attivata, la attivo
if ((mcp.digitalRead(IN[i]) == 0) & amp; & amp;
(STATO[i] == 0)) {
STATO[i] = 1;
Testo_Debug = “Pulsante“ + String(i + 1) + “premuto”;
Serial.println(Testo_Debug);
mcp.digitalWrite(OUT[i], HIGH);
}
//Se pulsante rilasciato e uscita attivata, la porto a riposo
if ((mcp.digitalRead(IN[i]) == 1) & amp; & amp;
(STATO[i] == 1)) {
STATO[i] = 0;
Testo_Debug = “Pulsante“ + String(i + 1) + “rilasciato”;
Serial.println(Testo_Debug);
mcp.digitalWrite(OUT[i], LOW);
}
}
delay(10);
}
Resta inteso che prima di poter caricare il codice nella memoria di programma della nostra Arduino è indispensabile scaricare la libreria dal sito www.adafruit.com e installarla mediante il Gestore delle librerie incluso nell’IDE, o semplicemente estrarre il contenuto del file ZIP e copiare quindi l’intera cartella “Adafruit_MCP23017_Arduino_Library” all’interno della directory “libraries” normalmente presente all’interno del sistema operativo al percorso “Documenti\Arduino\libraries”.
Caricata la libreria, sarà sufficiente caricare il nostro codice di esempio e caricarlo all’interno della scheda dopo aver scelto la corretta porta COM dal menu “Strumenti” dell’IDE.
Nel codice viene richiesto l’invio di un byte all’MCP23017, contenente lo stato dei pulsanti e i relativi dati vengono elaborati e quindi scritti su un byte diretto all’integrato, che imposterà lo stato delle linee del Port A in maniera stabile, fino al refresh.
Affinché l’interfacciamento funzioni è necessario impostare correttamente i dip-switch A0, A1 e A2 perché se al sensore non venisse assegnato l’indirizzo 0x20, verrebbe mostrato un messaggio di errore sulla seriale; l’address della breakout board si assegna con la combinazione 000 dei tre bit A0, A1, A2, quindi chiudendo a massa tutti e tre i dip-switch.
Se volete modificare l’indirizzo riferitevi alla solita Tabella 1, fermo restando che dovrete modificare l’address scritto nello sketch.