Non ci sono prodotti a carrello.
Rilevatore di movimento basato sull’effetto Doppler, realizzato abbinando un sensore specifico a un circuito che ne amplifica il segnale d’uscita.
Tra i dispositivi utilizzati nei sistemi di rilevamento della presenza e del movimento, da abbinare ad automatismi per l’apertura di porte e tornelli ma anche a impianti antifurto e anti-intrusione, spiccano i radar a infrarossi passivi (altrimenti detti P.I.R.) e i radar a microonde, i quali, rispetto ai primi, hanno la prerogativa di poter rilevare anche solo la presenza, ma soprattutto di riuscire a farlo persino se la persona o l’oggetto si trovano dietro pareti e porte, purché non in metallo o contenenti un’armatura metallica.
Vi proponiamo un nuovo progetto sviluppato attorno a un prestante radar operante in banda X e precisamente a 10,525GHz (questa è la frequenza tipica, ma i sensori commercializzati in Italia di solito operano a 9,9 GHz), capace di rilevare il movimento di persone e di oggetti nel proprio raggio d’azione.
Il sensore cui ci riferiamo è il popolare HB100 (prodotto dalla Agilsense) che è un dispositivo realizzato su circuito stampato in SMD, contenente un oscillatore che emette microonde da un’apposita antenna puntata frontalmente e riceve da un’antenna ricevente, miscelando in un mixer RF i due segnali e sfruttando così l’effetto Doppler.
L’elettronica è racchiusa frontalmente da un coperchio metallico (Fig. 1) che contiene anche le antenne per le microonde.

Fig. 1 Il sensore HB100 smontato.
Prima di procedere va precisato che HB100 è in realtà una famiglia di radar a microonde, i cui componenti si distinguono essenzialmente per la frequenza di accordo dell’oscillatore locale.
Il nostro HB100 (quello impiegato nel progetto descritto in queste pagine) è un sensore Bi-Static basato su un oscillatore DRO e una coppia di antenne Microstrip patch array.
Quindi il sensore funziona puntando delle onde radio molto direttive in direzione frontale e rilevandone la riflessione sugli oggetti che incontra mediante uno stadio ricevente (front-end) il cui segnale viene miscelato in un mixer AF con quello dell’oscillatore interno, che è lo stesso che pilota l’antenna irradiante; dal miscelatore esce una media frequenza (IF=Intermediate Frequency) di valore pari alla differenza tra la frequenza irradiata e quella che viene ricevuta, la quale differirà se le onde saranno state riflesse da un corpo in movimento, proprio a causa dell’effetto Doppler.
Il segnale IF è quindi quello che ci fornisce l’indicazione sul rilevamento di qualcosa che si muove davanti al sensore ed esiste solo quando c’è differenza tra la frequenza trasmessa (ossia generata dall’oscillatore locale) e quella ricevuta, quest’ultima dipendente da vari fattori come la massa e la velocità di spostamento del corpo su cui avviene la riflessione (target) e da altro ancora.
I diagrammi di irradiazione sui piani orizzontale e verticale delle onde RF sono mostrati nella Fig. 2 e permettono di capire quali sono le zone ottimali di rilevamento del radar.

Fig. 2 Diagramma polare di irradiazione sul piano orizzontale (Azimuth) e su quello verticale (Elevation).
Schema elettrico del Radar a Microonde
Per utilizzare il segnale IF nella gran parte delle applicazioni pratiche, occorre un “circuito di condizionamento” ossia un amplificatore, sostanzialmente, che ne renda il livello abbastanza elevato da poterlo poi inviare all’ADC di un microcontrollore (come ad esempio quello di Arduino) o ad un comparatore di tensione che commuti la propria uscita in base al superamento di una soglia che possiamo considerare sia quella di allarme e che in pratica corrisponderebbe alla dimensione o comunque capacità di riflessione del corpo in movimento, nonché della velocità di spostamento del corpo stesso.
Il circuito che vi presentiamo in queste pagine è quindi un amplificatore di tensione che prima di tutto eleva fortemente il livello del segnale fornito dall’uscita IF del modulo radar a microonde e poi filtra, tagliandola superiormente, la banda di frequenze, in modo da pulire il segnale da disturbi e spurie sfuggite al modulo.
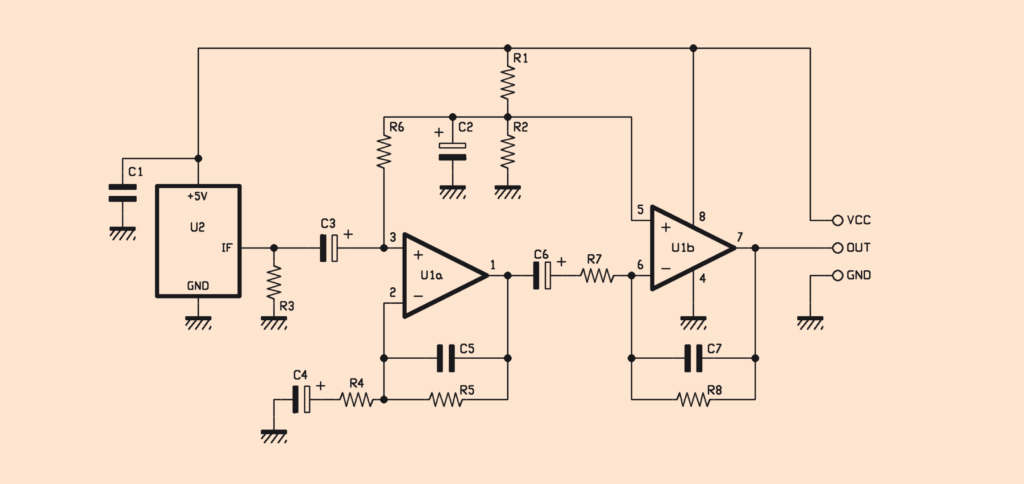
Diamo dunque uno sguardo allo schema elettrico che ci mostra un amplificatore a due stadi in cascata, realizzato con i due operazionali contenuti in un tradizionale LM358; il primo amplificatore lavora in configurazione non-invertente e il secondo (quello d’uscita) in modalità invertente, quindi il segnale di uscita sarà in opposizione di fase rispetto a quello ricevuto dall’uscita del modulo a microonde.
L’insieme presenta un elevato guadagno in tensione perché il segnale fornito all’uscita dal sensore ha un’ampiezza dell’ordine di poche decine di microvolt; per l’esattezza, il guadagno (G) del primo stadio è dato dalla formula:
G = (R4+R5) / R4
e, considerando i valori dei componenti, è pari a 101 volte in tensione. La formula non tiene conto della reattanza capacitiva dei condensatori presenti sulla rete di retroazione, che alle frequenze di lavoro, ossia quelle tipiche prelevate da IF del sensore a microonde, è trascurabile.
Quello del secondo stadio si calcola in maniera leggermente diversa, trattandosi di un amplificatore invertente; più esattamente, la formula è:
G = – R8/R7
Il guadagno G vale quindi circa 122 volte. Anche per questo stadio valgono le considerazioni appena fatte riguardo alla reattanza dei condensatori.
Essendo, i due amplificatori, in cascata, il guadagno complessivo teorico è dato dal prodotto dei singoli guadagni, quindi corrisponde a 12.322.
Quindi un segnale che entra in U1a con ampiezza di 10 microvolt esce da U1b ampio 0,123V e quindi abbastanza da poter essere letto ad esempio dall’A/D converter di una scheda Arduino o di qualsiasi microcontrollore.
Entrambi gli operazionali, essendo il circuito alimentato a tensione singola rispetto a massa, sono polarizzati a riposo con metà del potenziale di alimentazione e, grazie ai condensatori inseriti nella rete di retroazione, in continua presentano guadagno unitario, così da riportare all’uscita, sempre a riposo, metà della tensione di alimentazione.
Tale accorgimento si rende indispensabile perché altrimenti l’escursione della tensione d’uscita degli operazionali sarebbe solo per valori positivi e non negativi rispetto al riferimento a riposo; ponendo la tensione d’uscita a metà del potenziale di alimentazione, il segnale variabile amplificato potrà oscillare della stessa ampiezza sopra o sotto la tensione di riferimento, quindi gli operazionali potranno amplificare in maniera simmetrica.
La polarizzazione del caso si ottiene ricavando con il partitore resistivo R1-R2 metà potenziale di Vcc, quindi applicando tale tensione all’ingresso non-invertente dell’U1a (piedino 3) mediante R6 e all’invertente (piedino 2) di U2 direttamente; il condensatore elettrolitico C2, opportunamente calcolato, alle frequenze di lavoro praticamente cortocircuita il segnale, cosa necessaria perché essendo la rete di polarizzazione comune ai due operazionali, senza tale bypass il segnale d’ingresso di U1a finirebbe all’input invertente dell’U1b, saltando di fato il primo stadio.
Ad assicurare il guadagno unitario in continua provvede il condensatore C4 per il primo stadio e il C6 per il secondo, infatti nel primo caso, essendo la reattanza capacitiva di C4, in continua, di valore infinito e trovandosi il condensatore in serie a R4, G varrebbe 1. Quanto al secondo stadio, C6 va in serie a R7, quindi in continua il guadagno è unitario, essendo l’operazionale retroazionato dalla sola R8.
Notate che ogni stadio amplificatore ha sulla retroazione un condensatore di piccolo valore, il cui scopo è determinare, insieme al resistore cui è collegato in parallelo, un “polo” ovvero una frequenza di taglio superiore che impedisca di amplificare le spurie AF sfuggite al modulo radar e propagate sulla linea d’uscita, lasciando trattare il solo segnale uscente da IF, che è nativamente a bassa frequenza.
L’intero circuito viene alimentato con 5 volt, tramite i contatti Vcc e GND e la tensione alimenta tanto il doppio operazionale, quanto il sensore HB100, il quale all’interno dispone dei condensatori di filtro dell’alimentazione necessari a evitare che disturbi originati nell’oscillatore possano uscire attraverso l’alimentazione.
Piano di montaggio del Sensore a Microonde
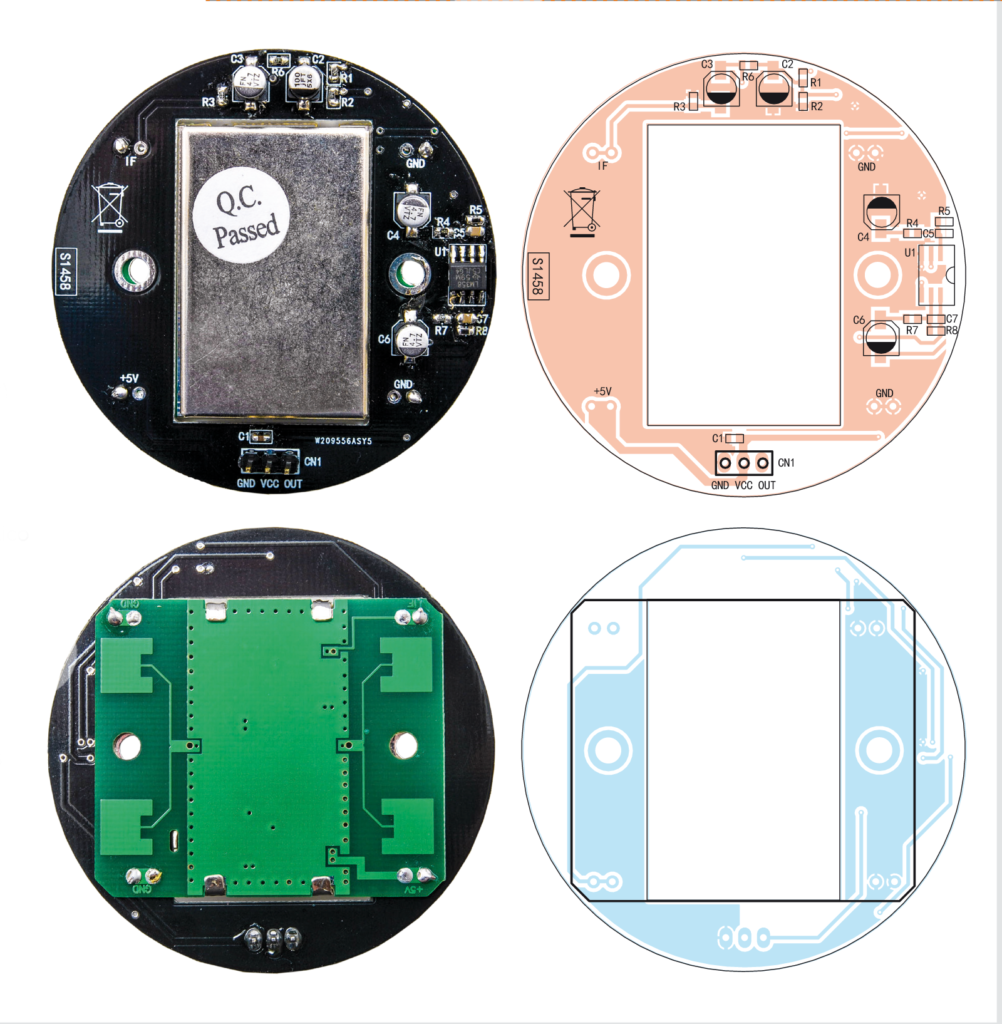
Elenco Componenti: R1, R2: 100 kohm (0603) R3: 12 kohm (0603) R4: 10 kohm (0603) R5, R8: 1 Mohm (0603) R6: 330 kohm (0603) R7: 8,2 kohm (0603) C1: 100 nF ceramico (0603) C2: 100 μF 6,3 VL elettrolitico (ø 4 mm) C3, C4: 4,7 μF 6,3 VL elettrolitico (ø 4 mm) C6: 4,7 μF 6,3 VL elettrolitico (ø 4 mm) C5, C7: 2,2 nF ceramico (0603) U1: LM358ADR U2: HB100 Varie: - Circuito stampato
Per l’alimentazione serve una fonte in grado di erogare una tensione continua del valore di 5V, preferibilmente stabilizzata, e una corrente di 60÷100 mA.
Per l’uscita utilizzate del cavetto schermato coassiale che permetta di portare il segnale al microprocessore limitando le interferenze captate.
Volendo potete integrare nel contenitore anche il circuito logico con il quale leggerete il segnale fornito dal circuito.
Quanto alle applicazioni pratiche del sensore, ricordiamo che può essere impiegato per ridurre i falsi allarmi nei sistemi anti-intrusione in abbinamento ai radar a infrarossi passivi (i popolari ed economici P.I.R.), ma anche per il rilevamento di persone o auto in modo da aprire automaticamente porte e cancelli motorizzati, ovvero accendere luci; inoltre può tornare utile nel rilevamento della velocità dei veicoli, in virtù del fatto che il segnale IF dipende, a parità di massa e superficie dell’oggetto target, dalla velocità di spostamento. Quindi ci si potrebbe costruire un autovelox.
In ogni caso il circuito utilizzato per leggere il segnale fornito dal sensore deve poter misurare la frequenza fornita, giacché è da essa che si ricavano le informazioni sulla velocità di spostamento del corpo e quindi sul fatto che qualcosa si muove o meno di fronte al radar; il microcontrollore del caso -perché è di questo che si parla- dovrà stabilire una soglia di frequenza sotto la quale ignorare il movimento e superata la quale si può ritenere che qualcosa si muova di fronte al sensore, stabilendo di fatto la sensibilità del rilevamento.
Per determinare la velocità di spostamento, nel caso si desideri costruire un misuratore di velocità, si potrà partire dallo shift di frequenza Fd e ricavare la velocità di spostamento V dalla formula inversa semplificata:
V = Fd / 18,33
valida, come sempre, alle condizioni che l’oggetto si muova di moto rettilineo allontanandosi dal sensore HB100.
Quindi, ad esempio, se leggiamo all’uscita IF o comunque sull’OUT dell’amplificatore uno shift di frequenza di 183,3 Hz, in dette condizioni possiamo ritenere che l’oggetto rilevato si sposti a una velocità di 10 km/h.
Per l’utilizzo del sensore va tenuto presente che il campo di sensibilità sui piani verticale e orizzontale è quello descritto nei diagrammi polari proposti qualche pagina indietro nella Fig. 2.
Conclusioni
In questo articolo vi abbiamo proposto l’abbinamento tra il sensore radar a microonde della famiglia HB100 e un amplificatore di segnale, indispensabile ad esempio per far acquisire e gestire a un microcontrollore dotato di ADC integrato, il segnale di media frequenza risultante dal battimento e quindi frutto del rilevamento di un oggetto.
Il circuito può costituire la base per ottenere anche solo un rilevatore stand-alone basato su un comparatore che stabilisce una soglia oltre la quale considerare avvenuto il rilevamento.
Ma l’abbinamento a un microcontrollore nel quale gira un firmware adatto, può permettere ad esempio di rilevare la velocità di un oggetto in movimento basandosi sulla differenza di frequenza (Doppler Shift) letta all’uscita IF.



2 Commenti