Non ci sono prodotti a carrello.
Scopriamo assieme l’utilissima configurazione SEPIC usata nei moderni converter per alimentazione mista.
Grazie alla disponibilità di un numero sempre maggiore di integrati specializzati che realizzano, con l’ausilio di pochissimi componenti esterni, dei completi e validi regolatori di tensione, oggi la tecnologia switching è quella più affermata quando si tratta di ricavare l’alimentazione per vari tipi di circuito o apparato; i “lineari” sono ormai riservati a circuiti di nicchia come gli amplificatori d’ingresso a bassissimo rumore, amplificatori per uso medicale e audio in tecnologia analogica.
Le soluzioni switching (a commutazione) vengono proposte in diverse varianti ma in questo articolo vogliamo segnalare, dopo una breve introduzione sulle tipologie di regolatori destinati all’alimentazione delle schede elettroniche, una tipologia di convertitore switching relativamente poco conosciuta ma molto utile in particolar modo per l’alimentazione a sorgenti miste (batteria+rete): si tratta della Sepic.
Tipologie di regolatori di tensione
Prima di entrare nel merito, facciamo una breve panoramica sulle tipologie di regolatori disponibili, che si dividono principalmente in due categorie:
• Regolatori lineari
• Alimentatori switching
I regolatori lineari
Sono stati i primi regolatori, inizialmente sviluppati con componenti discreti (transistor bipolari) e successivamente sostituiti da circuiti integrati specializzati.
I lineari esistono in configurazione serie e parallela, anche se la più usata è la prima. I più noti ed utilizzati regolatori lineari serie furono i famosi 78xx, dove xx indica la tensione in uscita: ad esempio il regolatore 7805 fornisce una tensione stabilizzata di 5 volt. Questi componenti sono ancora utilizzati e da essi derivano praticamente tutti i moderni integrati di alimentazione lineari; la loro configurazione è quella del regolatore “serie”, così detto perché si basa su un transistor posto in serie al carico, che fa cadere su di sé la differenza tra la tensione d’ingresso e quella d’uscita.
I regolatori di tensione del genere sono realizzati in innumerevoli versioni, che si differenziano sia per la corrente che sono in grado di sopportare, sia, più recentemente, per la caduta di tensione tra ingresso e uscita: il cosiddetti drop-out; i più apprezzati sono i regolatori LDO (Low Drop-Out), regolatori a bassa caduta, che permettono di ottenere, ad esempio, i 5 volt partendo da una tensione d’ingresso di soli 6-6,5 volt.
La tipica configurazione di un regolatore serie è quella mostrata nella Fig. 1, che riporta un canonico regolatore positivo (cioè per alimentazioni positive rispetto a massa) con transistor NPN (Q) configurato a collettore comune, polarizzato in base alla tensione stabilizzata da un diodo Zener e che alimenta il carico (R2, nello schema) tramite l’emettitore.
In questo semplicissimo schema, la tensione viene stabilizzata dal diodo Zene DZ, mentre il transistor Q, in configurazione ad emitter-follower, funziona da amplificatore di corrente fornendo una tensione pari a quella dello Zener, diminuita della sua Vbe, migliorando la stabilità della tensione sul carico grazie al fatto che può erogare correnti relativamente alte con minime deviazioni della tensione.
I regolatori integrati moderni sono molto più complessi dello schema di Fig. 1 e contengono elementi in grado di migliorare la stabilità della tensione in uscita grazie a meccanismi di retroazione ed altro; il principio però rimane identico, ed altrettanto è per il principale difetto di questa tipologia: tutta la corrente richiesta in uscita scorre attraverso il transistor, ai capi del quale deve cadere la differenza tra la tensione presente all’ingresso e quella in uscita.

Fig. 1
Vediamo il significato con un esempio pratico: in uscita abbiamo bisogno di una tensione stabilizzata di 5 volt e una corrente di 1 ampere, partendo da una tensione di ingresso di 9 volt; in questo caso sul transistor devono cadere 9-5=4 volt. Il nostro transistor si trova quindi a dissipare in calore una potenza pari a:
P = 4 V • 1 A = 4 W
Una potenza non trascurabile, considerando che quella fornita in uscita è di 5Vx1A= 5 watt. Una tale dissipazione impone di norma l’adozione di un dissipatore di calore per il transistor, il che significa spazio occupato sul circuito stampato, il costo del dissipatore e peso in più.
Per non parlare del fatto che la perdita di potenza sul transistor peggiora l’efficienza del regolatore; infatti l’efficienza, ovvero il rapporto tra la potenza fornita in uscita e quella assorbita in ingresso è pari a:
E = 5W / 9W = 0,55 = 55%
Quindi già relativamente bassa; il 45% della potenza disponibile viene dissipata in calore.
Se poi volessimo alimentare il nostro circuito con una tensione di 12 volt, sempre con 5 volt in uscita, avremmo una caduta sul transistor pari a 12-5=7 volt, ed una conseguente dissipazione pari a:
P = 7 V • 1 A = 7 W
cui corrisponde un’efficienza pari a:
E = 5W / 12W = 0,42 = 42%
Quindi, oltre a dover aumentare la dimensione del dissipatore, vediamo calare l’efficienza, con quasi il 60% dell’energia fornita sprecata in calore.
Ovviamente aumentando ulteriormente la tensione in ingresso le cose peggiorano; se dovessimo, come nel nostro caso, accettare 24 volt in ingresso, sul transistor avremmo una caduta pari a 24-5=19 V, con una dissipazione di 19 watt ed un’efficienza pari al 21% scarso, sprecando quindi in calore quasi l’80% dell’energia a disposizione (quindi otterremmo un’ottima stufetta da banco per i freddi pomeriggi invernali…).
Da queste considerazioni si evince che i regolatori lineari, per quanto economici, sono adatti solo per piccole differenze di tensione tra ingresso e uscita; non possono, inoltre, aumentare la tensione in ingresso ma solo ridurla, quindi sarebbe impossibile ottenere 5 volt con un’alimentazione da una batteria da 3-4 volt.
I regolatori lineari, pur con tanti svantaggi, hanno però un grosso pregio: non lavorando in commutazione, non generano disturbi impulsivi né ripple (residui di commutazione e del filtraggio della tensione pulsata che affligge gli switching); sono quindi ideali, come detto, per gli amplificatori di piccoli segnali e per l’audio.
Alimentatori switching
Gli alimentatori switching (a commutazione, in italiano…) funzionano secondo un principio totalmente diverso; trasformano i parametri della potenza trasferendola dall’ingresso all’uscita sotto forma di impulsi, che poi vengono applicati ad un condensatore ai cui capi si ottiene una tensione il cui valore continuo è pari al valore medio della forma d’onda costituita dagli impulsi.
Rispetto ai lineari hanno due grandi vantaggi: consentono -all’occorrenza- di ottenere tensioni d’uscita più elevate di quelle di ingresso e garantiscono un’efficienza più elevata, indipendente dalla tensione d’ingresso; quest’ultima caratteristica si deve al fatto che la conversione della tensione in impulsi si ottiene con transistor che lavorano come interruttori statici invece che come amplificatori e che quindi, anche ad elevate correnti, dissipano una potenza minima.
Degli switching ci interessa una particolare categoria che è quella più usata, ossia il tipo a carica d’induttanza; semplificando molto, questo “accumula” in un’induttanza una certa energia prelevata dall’ingresso e la rilascia all’uscita, con un’efficienza teorica di poco inferiore al 100%.
In Fig. 2 vediamo uno schema di principio di un alimentatore switching in grado di ridurre la tensione in ingresso, analogamente a quanto faceva il regolatore lineare di cui abbiamo detto prima; l’interruttore in figura è ovviamente sostituito da un transistor, quasi sempre un MOSFET, ma il circuito è idealmente realizzabile anche con soli componenti meccanici, fermi restando i limiti nella velocità di commutazione.

Fig. 2
Quando l’interruttore si chiude, la corrente non passa attraverso il diodo (che risulta polarizzato inversamente, avendo al catodo una tensione positiva) e va a caricare l’induttanza; aprendo l’interruttore, l’induttanza cerca di mantenere costante la corrente che l’attraversa, quindi la corrente fluisce attraverso il diodo ed il carico, come negli schemi mostrati nella Fig. 3 e nella Fig. 4.
Le due fasi del funzionamento sono quindi:
• interruttore chiuso; la corrente fluisce dal generatore al carico, passando attraverso l’induttore che viene quindi caricato; il diodo risulta polarizzato inversamente e quindi non conduce;
• interruttore aperto; l’induttanza si scarica attraverso il carico ed il diodo che in questo caso risulta polarizzato direttamente.
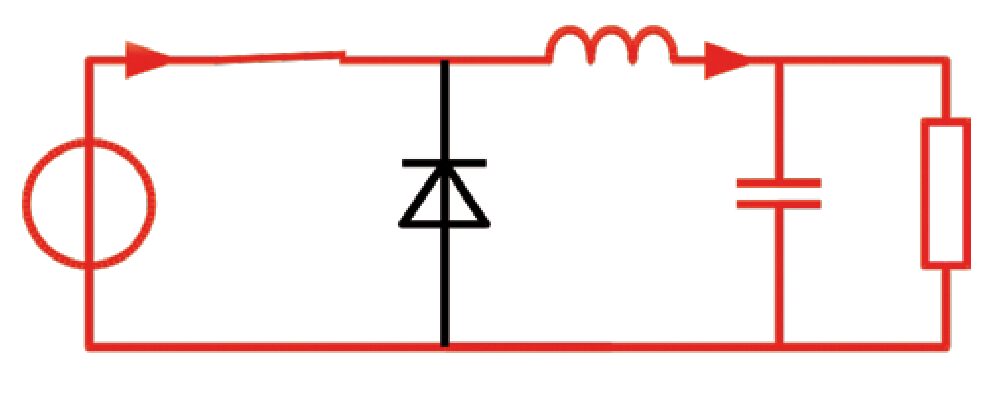
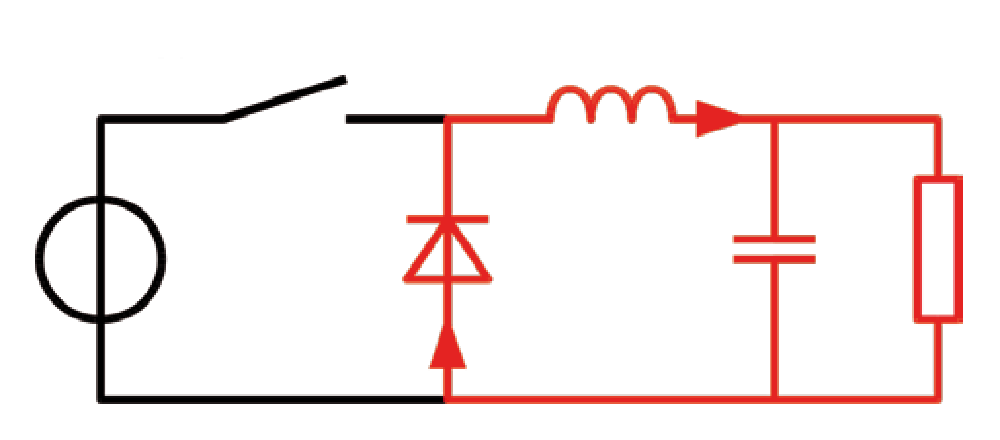
Fig. 4
Facciamo ora un po’ di teoria su questo tipo di convertitore, in modo da familiarizzare nei limiti dell’articolo con il funzionamento e la terminologia.
Innanzitutto partiamo dal presupposto che la tensione in uscita in un dato istante sia quella richiesta, Vo, mentre quella in ingresso sia Vi.
Dallo schema si evince che in quell’istante la tensione ai capi dell’induttanza sia pari a Vi-Vo ad interruttore chiuso e pari a Vo (salvo la caduta Vd sul diodo che al momento trascuriamo) ad interruttore aperto.
Immaginiamo anche, cosa realistica per carichi non troppo bassi, che la corrente nell’induttanza non vada mai a zero, e che quindi il convertitore funzioni in modalità continua (CCM).
La trattazione per la modalità discontinua, ovvero nel caso che la corrente nell’induttanza vada a zero, è più complicata e quindi la eviteremo.
La relazione che lega corrente e tensione ai capi dell’induttanza è la seguente:
che indica che la tensione ai capi dell’induttanza è uguale al suo valore moltiplicato per la variazione della corrente nel tempo.
Invertendo l’equazione ed integrandola, si ottiene per il periodo in cui l’interruttore è chiuso:

E per il periodo in cui l’interruttore è aperto:
Da queste due equazioni si nota che durante il tempo di chiusura dell’interruttore la corrente nell’induttanza cresce proporzionalmente alla differenza tra tensione in ingresso ed in uscita (Vi-Vo) ed al tempo di chiusura dell’interruttore ed inversamente con il valore dell’induttanza.
Semplificando, più sono grandi la differenza tra Vi e Vo ed il tempo di chiusura e più l’induttanza è piccola più la corrente nella medesima cresce.
Durante il tempo di apertura dell’interruttore, per contro, l’induttanza si scarica (segno meno davanti a Vo nell’equazione) proporzionalmente alla tensione in uscita ed inversamente con il valore dell’induttanza. Un’aspetto che salta all’occhio rapidamente è che più è grande l’induttanza e meno la corrente nella stessa cresce, il che si traduce in meno “sforzi” nei circuiti che la circondano, ma ad una grossa induttanza corrispondono dimensioni maggiori e/o perdite maggiori dovute alla resistenza del filo con cui è costituita, di cui parleremo in seguito.
Avendo considerato l’ipotesi di regime stazionario, ovvero tensione in uscita costante e corrente nell’induttanza mai nulla, avremo che la corrente accumulata durante la chiusura dell’interruttore dovrà essere rilasciata esattamente e per intero durante l’apertura dell’interruttore; possiamo quindi scrivere:

Ovvero, sostituendo con quanto ricavato prima:
Siccome a noi interessa calcolare il valore della tensione in uscita in base ai tempi di chiusura ed apertura dell’interruttore, risolviamo per Vo :
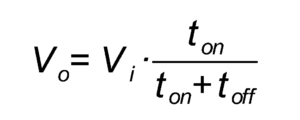
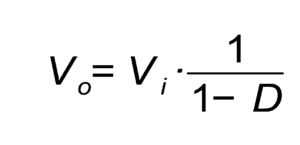
E, chiamando D il duty-cycle dell’interruttore, ovvero il rapporto tra tempo in cui rimane chiuso ed il tempo totale:

Possiamo scrivere l’equazione finale del nostro convertitore:

Si noti che il duty-cyle D può avere valori compresi tra 0 e 1, quindi la tensione in uscita può essere inferiore o uguale a quella di ingresso, ma mai superiore, con questa tipologia di convertitore.
Per chi conosce un po’ il mondo Arduino e le sue uscite in PWM, è facile pensare ad utilizzare al posto dell’interruttore un MOSFET ed applicarvi al gate un’onda quadra fornita da un’uscita di Arduino. Scegliendo un valore di D del 25%, ad esempio, otteniamo in uscita un quarto della tensione in ingresso.
Qualcuno avrà notato che nella nostra bellissima e semplicissima equazione è misteriosamente sparita l’induttanza L, che quindi non va ad influenzare il valore della tensione in uscita in alcun modo.
Possiamo quindi scegliere un valore qualsiasi per L? In teoria si, se non ci interessassero altri fattori e, soprattutto, se l’induttanza fosse ideale, ovvero senza alcuna resistenza elettrica nel filo che la compone.
Abbiamo infatti visto sopra che la corrente nell’induttanza (e quindi in buona parte del circuito) cresce più rapidamente con il diminuire dell’induttanza stessa e con l’aumento del tempo di chiusura.
Quindi per bassi valori dell’induttanza e/o lunghi tempi di chiusura dell’interruttore la corrente crescerà molto, col rischio di danneggiare i componenti stessi; inoltre grosse variazioni della corrente corrispondono a grossi disturbi elettromagnetici generati dal circuito e che vanno a finire nell’apparecchio alimentato.
Per contro, se aumentiamo troppo l’induttanza questa avrà una resistenza dovuta al filo piuttosto elevata (più alto è il valore e più spire di filo servono) il che comporterà perdite di energia trasformata in calore ed una conseguente diminuzione di efficienza del convertitore, oltre che a dimensioni più elevate.
Si nota inoltre che a parità di condizioni (induttanza e valori Vi e Vo) diminuendo i tempi di chiusura ed apertura la corrente si mantiene più bassa. Una diminuzione dei tempi di apertura e chiusura (mantenendo D costante) corrisponde però ad un aumento della frequenza di commutazione; parrebbe quindi ottimale scegliere un’induttanza piccola ed una frequenza il più elevata possibile.
Purtroppo, per quanto si tenti di fare il più possibile, sfruttando i moderni componenti elettronici, esistono dei limiti invalicabili sia per la frequenza con cui possono operare i medesimi sia a causa delle perdite di commutazione dovute all’impossibilità di un’azione istantanea.
Anche qui occorre un compromesso tra frequenza elevata e possibilità offerte dai componenti a disposizione; se per un convertitore a componenti discreti già raggiungere e superare le poche centinaia di kHz di frequenza era una cosa straordinaria, con i moderni circuiti integrati si riescono a raggiungere frequenze superiori al MHz e, negli ultimi anni, persino superiori ai 3 MHz.
Questo si traduce in una maggior compattezza degli alimentatori, maggiore efficienza e minor costo, a costo di una maggior attenzione necessaria nella disposizione dei componenti sul PCB, come vedremo nella seconda puntata, nella quale presenteremo un circuito pratico di converter.
Efficienza del convertitore switching
Analizzando il circuito ideale di cui abbiamo scritto finora, la prima cosa che salta all’occhio è che in esso non sono presenti componenti resistive: l’energia fornita dall’alimentatore va a caricare un’induttanza ideale, quindi priva di resistenza ohmica, la quale poi si scarica sul carico attraverso il medesimo e il diodo, immaginato anch’esso come ideale.
Quindi tutta l’energia prelevata dal generatore viene trasmessa al carico con un’efficienza del 100%.
Un bel salto di qualità rispetto al 60-40-20% del regolatore lineare!
Purtroppo i componenti ideali non esistono: l’induttanza è costituita da un filo di rame con una certa resistenza, il diodo -anche selezionandolo accuratamente- ha una certa caduta di tensione ai suoi capi, le stesse piste del PCB sono in rame e quindi affette da resistenza elettrica e l’interruttore, costituito nel 99% dei casi da un MOSFET, ha una pur minima resistenza d’inserzione.
Infatti per quanto la tecnologia di questi componenti abbia fatto progressi enormi negli ultimi decenni, il MOSFET ha una resistenza ohmica tra drain e source ed un tempo di commutazione non nulli.
Questo si traduce in una perdita di efficienza, il cui calcolo esula dallo scopo del presente articolo, che è comunque facilmente verificabile misurando la corrente assorbita e quella fornita al carico.
La potenza assorbita è infatti, pari a:
mentre la potenza restituita al carico è pari a:
 E l’efficienza è data da:
E l’efficienza è data da:
Nelle condizioni reali del nostro convertitore si ha sempre Po < Pi e quindi un’efficienza inferiore al 100% teorico. Vedremo i valori in gioco quando parleremo del nostro circuito reale.
Il ripple
Abbiamo visto finora come il nostro convertitore sfrutta l’induttanza per immagazzinare energia che viene poi restituita al carico ad una tensione diversa, e lo fa, a differenza dei regolatori lineari visti in precedenza, tramite un meccanismo di commutazione.
È quindi ovvio che, tra tutti i pregi del nostro convertitore, un grosso difetto appare: alla tensione continua in uscita troviamo, sovrapposta, una tensione variabile più o meno piccola, detta ripple.
Quanto essa è piccola, dipende principalmente dal valore della capacità in uscita e dalla frequenza di commutazione; più alti saranno i valori dei suddetti parametri e minore sarà il ripple, con le problematiche che abbiamo visto prima, ovvero capacità ingombrante ed altri problemi se si aumenta il condensatore e problemi di commutazione/limiti tecnologici se si aumenta la frequenza.
Anche l’induttanza ed altri parametri influenzano il ripple. Occorre quindi il solito compromesso tra i valori, e per questo è necessario quantificare il ripple e decidere se è o meno un valore accettabile.
Purtroppo un calcolo preciso del ripple è piuttosto complicato, e lo vedremo abbastanza in dettaglio nello schema definitivo; al momento basti sapere che aumentando la capacità e/o la frequenza il ripple diminuisce.
Aumentare la tensione in ingresso
Il convertitore switching visto finora è in grado di diminuire la tensione del generatore per portarla a quella necessaria al carico, vale a dire di ricavare una tensione d’uscita inferiore a quella di ingresso; viene, perciò, definito “step-down” (abbassatore). Esso va benissimo se, per esempio, abbiamo come fonte di alimentazione principale una batteria a 12 volt e vogliamo ottenere 5 volt in uscita.
Ma cosa succede se l’esigenza è inversa, ovvero abbiamo, per esempio, una batteria LiPo in grado di fornire una tensione compresa tra 3 e 4 volt circa ed abbiamo bisogno dei fatidici 5 volt?
In questo caso ci viene in aiuto un’altra tipologia di convertitore switching chiamata boost converter, ovvero un convertitore “step-up” (elevatore).
Come si vede nella Fig. 5, che lo schematizza, la differenza rispetto allo schema di principio precedente è che l’induttanza si trova prima dell’interruttore e che quest’ultimo la cortocircuita verso massa.
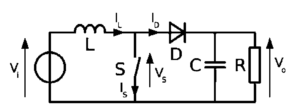
Fig. 5
Le due fasi di funzionamento sono:
• interruttore chiuso; la corrente fluisce dal generatore (tensione applicata all’ingresso del converter) nell’induttanza, caricandola (Fig. 6);
• interruttore aperto; l’induttanza cerca di mantenere il flusso di corrente di quando l’interruttore era chiuso, reagendo all’apertura con un’extratensione inversa che trova sfogo nel condensatore e che fluisce nello stesso verso, caricando la capacità con polarità positiva sul catodo del diodo.

Fig. 6
Riassumendo, quando l’interruttore è chiuso tutta la corrente fornita dal generatore va a caricare l’induttanza, mentre il carico è alimentato solo dal condensatore di uscita, mentre ad interruttore aperto l’induttanza si trova in serie al generatore e quindi la tensione ai suoi capi va a sommarsi a quella del generatore stesso, aumentandola.
Il diodo serve, nelle fasi in cui l’interruttore è chiuso e l’induttanza in carica, ad evitare che il condensatore venga scaricato dall’interruttore stesso.
Senza ripetere i calcoli precedenti, e sempre sotto le medesime ipotesi, l’equazione per calcolare la tensione in uscita diventa:
Poichè D è sempre inferiore a 1 (il duty-cycle …ricordate?) la tensione in uscita sarà sempre maggiore di quella in ingresso.
Tensione in uscita compresa tra la minima e la massima in ingresso
Abbiamo fin qui visto due tipologie di convertitori, uno in grado di diminuire la tensione in ingresso (buck converter) e l’altro in grado di aumentarla (boost converter).
Cosa succede, però, se abbiamo bisogno di una tensione in uscita intermedia? Per esempio, se vogliamo alimentare il nostro apparecchio a 5 volt ed abbiamo a disposizione a volte una batteria LiPo da 4,2 V e altre un alimentatore esterno da 12 volt, oppure abbiamo un circuito che funziona a 3,3 volt e dobbiamo alimentarlo con una LiPo che fornisce 4,2 volt quando è completamente carica e 3 volt quando è quasi scarica?
Una soluzione immediata è utilizzare due convertitori, selezionando tramite un commutatore (manuale o elettronico) quello da usare di volta in volta; la soluzione -tuttavia- è piuttosto macchinosa e problematica.
Un’altra alternativa è usare un convertitore boost per portare la tensione in ingresso al valore massimo accettato e poi un buck in cascata per riportarla a 5 volt. Nel nostro caso avremmo:
![]()
Anche questa soluzione è macchinosa, utilizza due convertitori completi e raddoppia le perdite di potenza, diminuendo l’efficienza complessiva.
Esistono convertitori buck-boost che permettono di ottenere tensioni in uscita qualsiasi ma, se non sono isolati da un trasformatore, le ottengono con polarità inversa rispetto a quella in ingresso, il che spesso è inaccettabile.
Tra le varie tipologie implementate, ne è recentemente emersa una, chiamata SEPIC, principalmente spinta dall’avvento delle batterie LiPo, le quali, come appena detto, forniscono una tensione che a piena carica è di 4,2 V e a fine carica scende anche sotto i 3 volt; è nata per alimentare dispositivi che richiedono 3,3 volt, ossia una tensione compresa fra questi valori.
Anche qui ci troviamo nel caso di una tensione in uscita intermedia tra i valori possibili in ingresso, anche se la finestra è meno ampia.
Il convertitore SEPIC
Lo schema di principio del convertitore DC/DC SEPIC è illustrato nella Fig. 8: rispetto ai convertitori visti in precedenza si notano subito la doppia induttanza ed il condensatore C1, che costituiscono la “complicazione” rispetto agli altri.
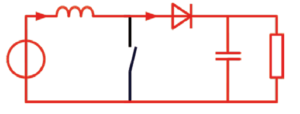
Fig. 7
Una nota positiva rispetto al buck converter è che in quest’ultimo, se l’interruttore va in cortocircuito, tutta la tensione in ingresso finisce sul carico, che ha molte probabilità di subire danni; invece nel SEPIC, grazie al condensatore C1, la componente in continua del generatore viene bloccata e, in caso di guasto, la tensione in uscita va a zero proteggendo quindi i dispositivi alimentati.
Il funzionamento è comunque decisamente più complesso e merita un’analisi dettagliata: iniziamo col considerare il funzionamento continuo (CCM) che si ottiene quando la corrente nell’induttanza L1 non va mai a zero; anche qui la trattazione del funzionamento discontinuo verrà tralasciata.
In condizioni di stabilità, la tensione media ai capi del condensatore C1 (VC1) è uguale alla tensione in ingresso (VIN). Poiché il condensatore C1 blocca la componente continua, la corrente media attraverso di esso (IC1) è nulla, rendendo l’induttanza L2 l’unica sorgente di corrente continua per il carico.
Quindi la corrente media che attraversa l’induttanza L2 (IL2) è la stessa della corrente media sul carico e quindi indipendente dalla tensione in ingresso.
Analizzando le tensioni medie sul circuito possiamo scrivere:
VIN = VC1 + VL1 + VL2
e, poichè la tensione media VC1 è uguale a VIN:
VL1 = -VL2
Questo rende possibile avvolgere le induttanze su un unico nucleo, visto che l’equazione precedente dice che l’influenza dell’induttanza mutua tra le due è nulla.
Non sarà il nostro caso, per problemi di reperibilità di componenti, ma questo costituisce un grosso vantaggio a livello industriale.
Anche le correnti di picco nelle due induttanze saranno identiche in valore assoluto.
Le correnti medie possono essere quindi espresse da:
ID1 = IL1 – IL2
essendo la corrente media in C1 nulla.
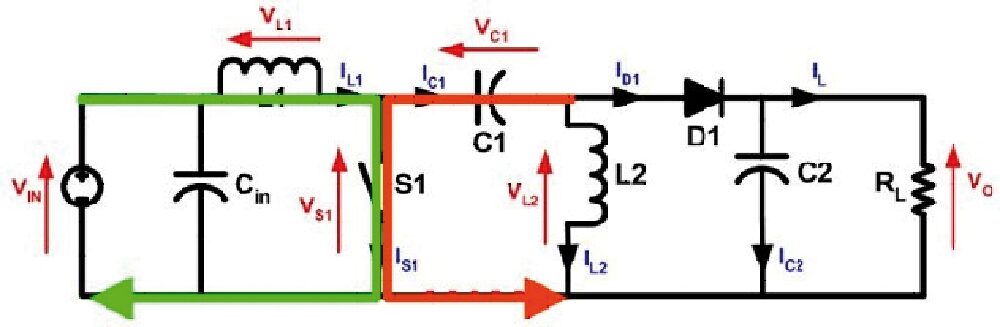
Quando l’interruttore è chiuso abbiamo la condizione rappresentata nella Fig. 8
La tensione in ingresso va a caricare l’induttanza L1, mentre l’induttanza L2 viene caricata dalla tensione di C1 che, come abbiamo detto, è pari alla tensione di ingresso, inizialmente.
Si noti che l’induttanza L2 è caricata da una corrente di segno opposto alla L1 e quindi matematicamente scaricata (segno negativo), cosa da tener conto nelle operazioni.
Aprendo l’interruttore otteniamo la situazione rappresentata nella Fig. 9: siccome l’induttanza L1 rende impossibile una variazione istantanea della corrente, tutta la corrente che attraversa L1 dovrà forzatamente attraversare anche C1. La corrente in L2 continuerà a scorrere come in precedenza in direzione opposta, però questa volta attraversando il carico (linea rossa nello schema di Fig. 9). Quindi avremo una corrente negativa (IL1) che andrà a sommarsi alla corrente IL2.
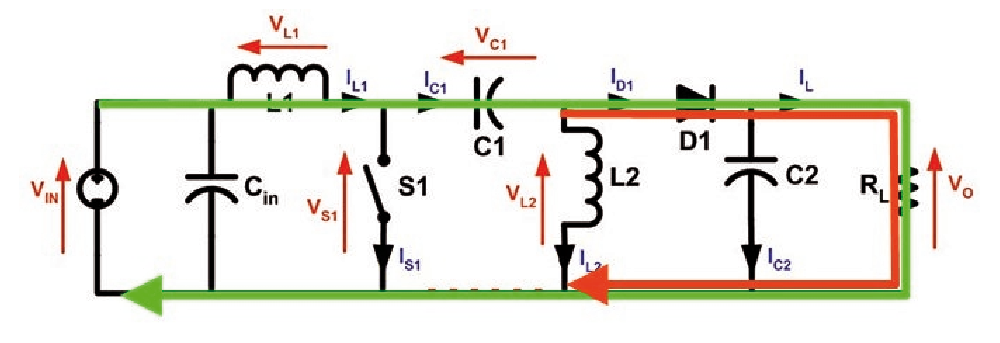
Fig. 9
Dalla Legge di Kirchoff applicata ai nodi si ottiene la relazione:
ID1 = IC1 – IL2
quindi la corrente al carico, ad interruttore aperto, viene fornita sia da L2 che da L1, mentre il condensatore C1 viene ricaricato da L1.
In sintesi:
• a interruttore chiuso, la sorgente di alimentazione carica L1, mentre C1 carica L2;
• a interruttore aperto, l’induttanza L1 e la L2 alimentano il carico, mentre L1 ricarica C1.
La tensione su C1 può cambiare di segno durante le operazioni, quindi occorre inserire un condensatore non polarizzato come componente.
Il funzionamento del convertitore può essere visto come l’accoppiamento di un convertitore boost composto da L1 e l’interruttore, che generano una tensione VS1 superiore a quella di alimentazione, seguito da un convertitore buck che riduce la VS1 al valore richiesto.
Siccome la tensione ai capi di C1 è pari a VIN, come visto in precedenza, la tensione in uscita diventa:
VO = VS1 – VIN
Quindi se VS1 è minore del doppio di VIN la tensione in uscita sarà inferiore a quella in ingresso, in caso contrario sarà superiore.
Senza scendere ulteriormente in dettaglio, l’equazione che regola il rapporto tra tensione in ingresso ed in uscita è pari a:
nella quale D rappresenta il solito duty-cycle, ovvero il rapporto tra i tempi di interruttore chiuso sul tempo totale (aperto + chiuso).
Da qui si ricava:
Che mostra come la tensione in uscita è minore di quella in ingresso per D < 0,5 e maggiore per D > 0,5.
Le formule suesposte valgono, come sempre, in assenza di componenti dissipativi (resistivi) e/o non lineari (MOSFET, diodi ecc.) nel circuito, cosa non vera in pratica; ad esempio sono da considerare la caduta di tensione sul diodo, le resistenze degli avvolgimenti, l’ESR del condensatore, eccetera, che contribuiscono sia a modificare leggermente la formula che a ridurre l’efficienza.
Calcolo dei componenti del convertitore
Per darvi la possibilità di capire come calcolare ed eventualmente realizzare convertitori SEPIC con componenti e caratteristiche personalizzati, trovate qui sotto un foglio di calcolo realizzato in Open Office (l’applicazione è Calc ed è compatibile anche con Libre Office) che permette il dimensionamento dei componenti di un convertitore SEPIC sulla base dei valori di correnti e tensioni in gioco.
Download
Calcolo SEPIC
1 file(s) 198 KB
Per il download di questo file è necessario essere registrati al sito